倒立振り子を制御する
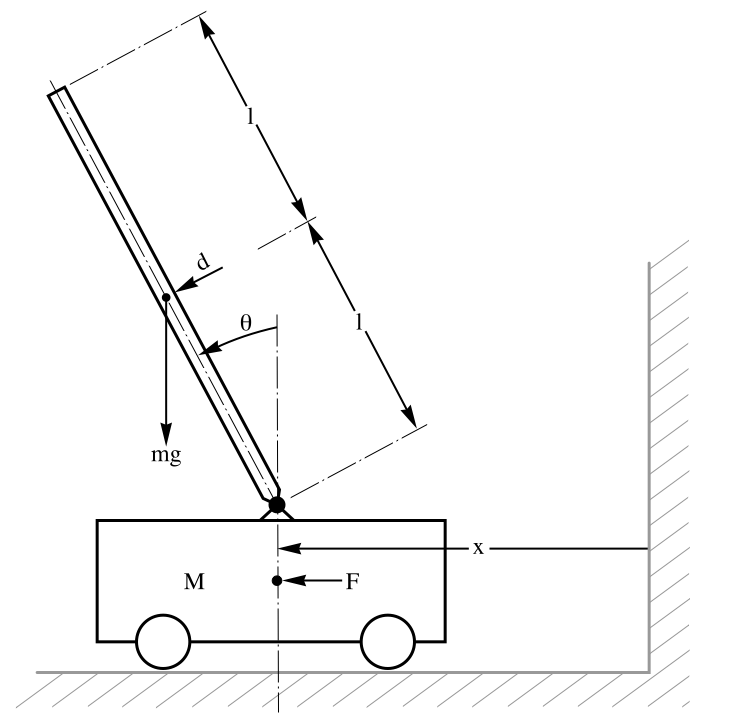
この古典的な制御系問題では,制御器は不安定な平衡の周りの系を安定化するように設計される.倒立振り子は,垂直位置の周りで線形化される.StateFeedbackGainsは,制御器として考えられ,系の極を複素平面の左半分に置く行列を与える.その後閉ループ系のシミュレーションを2度行う.
この古典的な制御系問題では,制御器は不安定な平衡の周りの系を安定化するように設計される.倒立振り子は,垂直位置の周りで線形化される.StateFeedbackGainsは,制御器として考えられ,系の極を複素平面の左半分に置く行列を与える.その後閉ループ系のシミュレーションを2度行う.