调整倒立摆
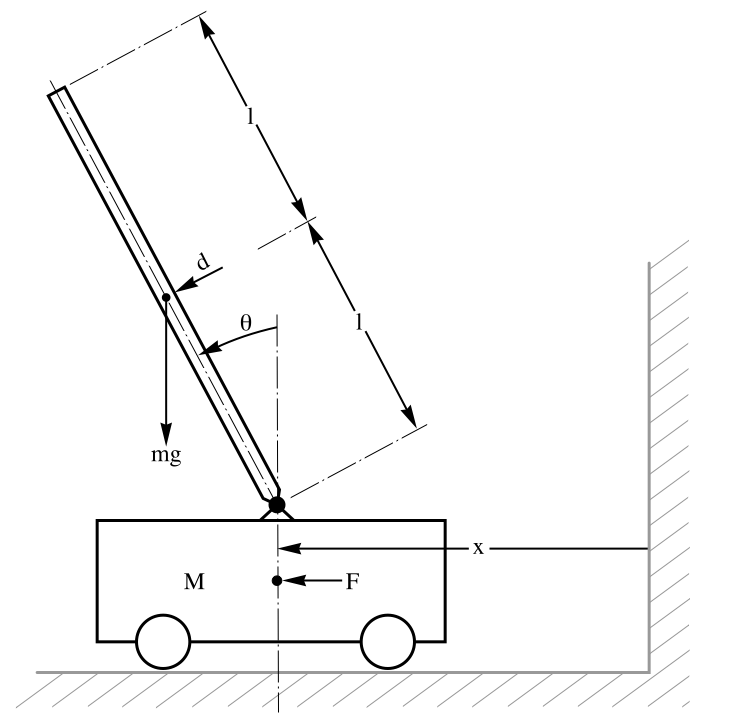
在这个经典的控制系统问题中,要设计一个控制器,使一个处于不稳定平衡的系统达到稳定. 将倒立摆关于垂直位置线性化. StateFeedbackGains 给出一个可被认为是控制器的矩阵,它把极点放在复平面的左半部分. 然后对闭环系统进行两次仿真.
在这个经典的控制系统问题中,要设计一个控制器,使一个处于不稳定平衡的系统达到稳定. 将倒立摆关于垂直位置线性化. StateFeedbackGains 给出一个可被认为是控制器的矩阵,它把极点放在复平面的左半部分. 然后对闭环系统进行两次仿真.