基于知识的革命性编程语言
适用于任何技术流程的卓越工作环境
实际数据的系统框架
Wolfram 云端产品与服务的核心基盘
执行 Wolfram 语言的软件引擎
在云端、桌面、移动设备等上的即时部署
计算世界中的由技术驱动的科学
广泛部署的基于知识的自然语言
驱动 Wolfram|Alpha 的精选专业可计算知识
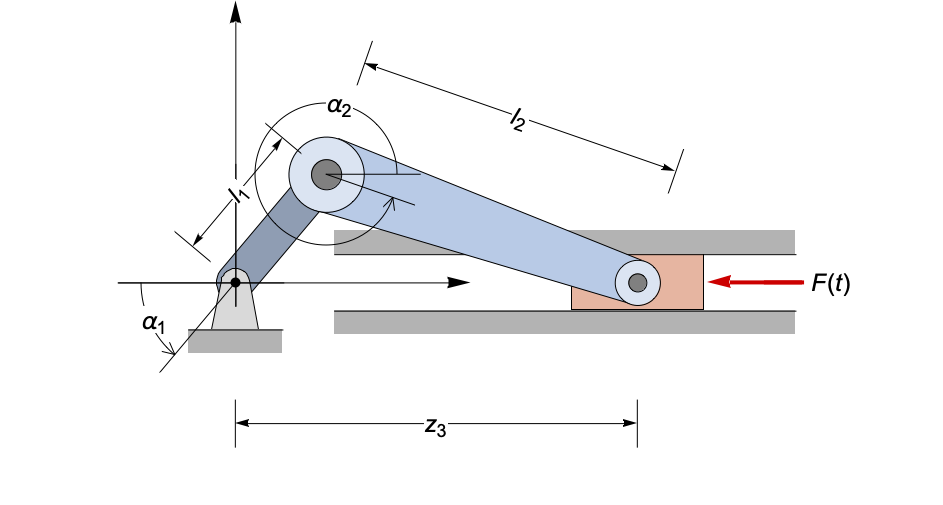
对遭受外力的简单曲柄滑块机械装置的运动建模.
启用 JavaScript 与内容交互以及在 Wolfram 网站提交申请。了解更多