WOLFRAM SYSTEM MODELER
BallAndBeamClosedLoopSystemA controlled ball and beam system |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Modeling.BallAndBeamClosedLoopSystem"]
Out[1]:=
Information
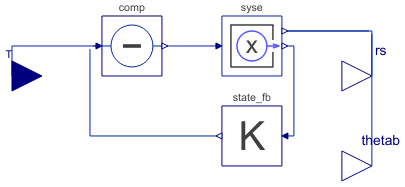
This system consists of a ball on a beam, rolling without slipping. External torque applied over the beam is controlled using state feedback. The first priority of the controller is to make sure that the ball does not fall off the beam.
Connectors (3)
| T |
Type: RealInput Description: Disturbance torque |
|
|---|---|---|
| rs |
Type: RealOutput Description: Position of the ball |
|
| thetab |
Type: RealOutput Description: Angle of the beam |
Components (3)
| syse |
Type: BallAndBeam_extended Description: A model that encloses a plant and passes its states as outputs |
|
|---|---|---|
| state_fb |
Type: state_feedback Description: Feedback gain component |
|
| comp |
Type: comparator Description: Comparator model |