WOLFRAM SYSTEM MODELER
FlatTankFlat model of a tank |
|
Wolfram Language
In[1]:=
SystemModel["IntroductoryExamples.Hierarchical.FlatTank"]
Out[1]:=

Information
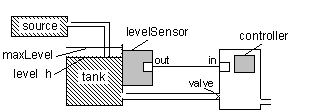
This is a flat model of the following one-tank system with a controller:
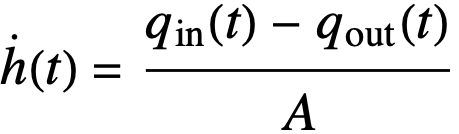
The water level, h, in the tank is a function of the flow in and out from the tank, and the tank area:
The input flow is constant the first 150 seconds and then triples:
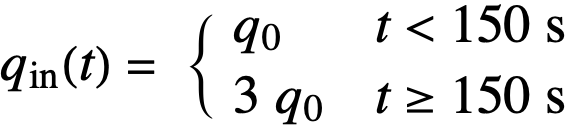
where flowLevel is a parameter. By controlling the output flow the tank level is held at a desired reference value. The following PI controller is used in the model:
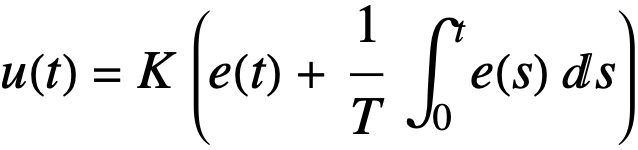
where K is the controller gain and T is the integrator time constant. Finally the output flow is limited between a minimum value, minFlow, and a maximum, maxFlow.
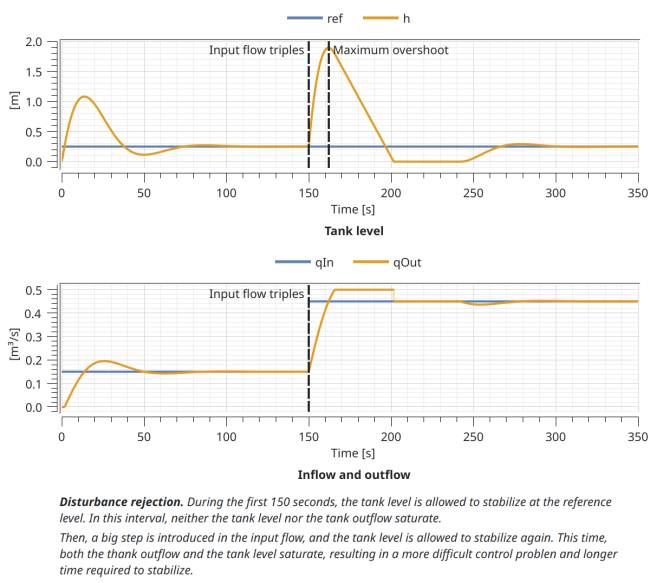
By simulating the model for 350 seconds we can see that the tank level starts to increase reaching and passing the desired reference level. When the desired level is passed the outflow is opened and after 150 seconds the level has stabilized. However at this moment the input flow is suddenly increased and the water level is therefore increased before the controller manages to stabilize it again. This is illustrated in the figure below:
The TankPI model is a component based model of the same system.
Parameters (7)
| q0 |
Value: 0.15 Type: Real (m³/s) Description: Scaling of input flow |
|---|---|
| A |
Value: 1.0 Type: Real (m²) Description: Tank bottom area |
| K |
Value: 0.1 Type: Real ((m³/s)/m) Description: PI controller gain |
| T |
Value: 10 Type: Real (s) Description: PI controller integrator time constant |
| minFlow |
Value: 0.0 Type: Real (m³/s) Description: Minimum flow through output valve |
| maxFlow |
Value: 0.5 Type: Real (m³/s) Description: Maximum flow through output valve |
| ref |
Value: 0.25 Type: Real (m) Description: Reference level for control |