WOLFRAM SYSTEM MODELER
ControllerSimple position controller for actuator |
|
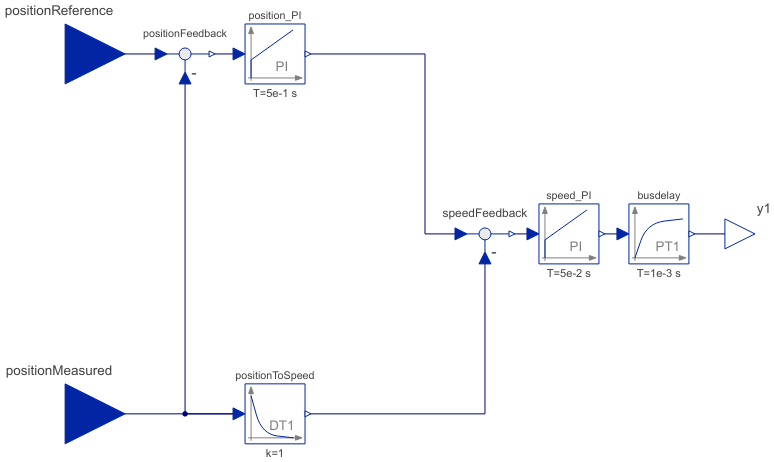
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Blocks.Examples.NoiseExamples.Utilities.Parts.Controller"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
A simple position controller for a drive system. This controller is used in the Examples.NoiseExamples.ActuatorWithNoise actuator example
Connectors (3)
| positionMeasured |
Type: RealInput Description: Position signal of motor |
|
|---|---|---|
| positionReference |
Type: RealInput Description: Reference position |
|
| y1 |
Type: RealOutput Description: Connector of Real output signal |
Components (6)
| speed_PI |
Type: PI |
|
|---|---|---|
| speedFeedback |
Type: Feedback |
|
| positionToSpeed |
Type: Derivative |
|
| position_PI |
Type: PI |
|
| positionFeedback |
Type: Feedback |
|
| busdelay |
Type: FirstOrder |
Used in Examples (1)
|
Modelica.Blocks.Examples.NoiseExamples Demonstrates how to model measurement noise in an actuator |
Revisions
| Date | Description | ||
|---|---|---|---|
| June 22, 2015 |
|
