WOLFRAM SYSTEM MODELER
MVdiscreteDiscrete Multi-Variable controller |
|
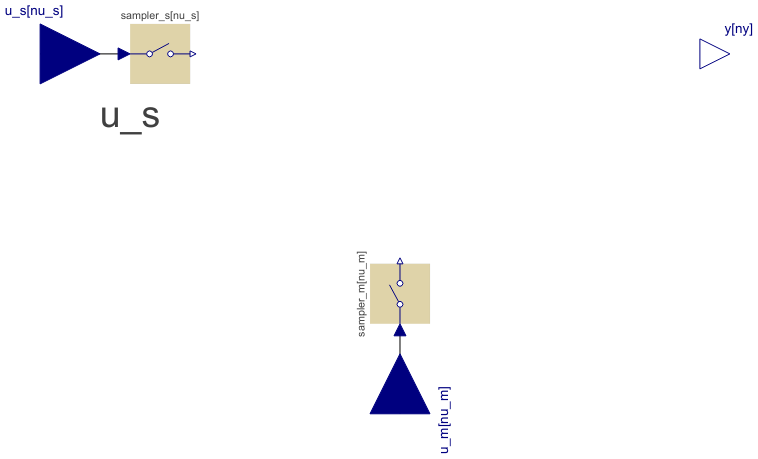
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Blocks.Interfaces.MVdiscrete"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Block has two Real input signal vectors and one Real output signal vector. The vector signals are sampled due to the defined samplePeriod parameter. The block is designed to be used as base class for a corresponding controller. See the base-class DiscreteBlock for more information.
Parameters (5)
| samplePeriod |
Type: Time (s) Description: Sample period of component |
|---|---|
| startTime |
Value: 0 Type: Time (s) Description: First sample time instant |
| nu_s |
Value: 1 Type: Integer Description: Number of setpoint inputs |
| nu_m |
Value: 1 Type: Integer Description: Number of measurement inputs |
| ny |
Value: 1 Type: Integer Description: Number of actuator outputs |
Outputs (2)
| sampleTrigger |
Type: Boolean Description: True, if sample time instant |
|---|---|
| firstTrigger |
Type: Boolean Description: Rising edge signals first sample instant |
Connectors (3)
| u_s |
Type: RealInput[nu_s] Description: Setpoint input signals |
|
|---|---|---|
| u_m |
Type: RealInput[nu_m] Description: Measurement input signals |
|
| y |
Type: RealOutput[ny] Description: Actuator output signals |
Components (2)
| sampler_s |
Type: Sampler[nu_s] Description: Ideal sampling of continuous signals |
|
|---|---|---|
| sampler_m |
Type: Sampler[nu_m] Description: Ideal sampling of continuous signals |