WOLFRAM SYSTEM MODELER
IMC_DCBrakingInduction machine with DC current braking |
|
Diagram
Wolfram Language
In[1]:=
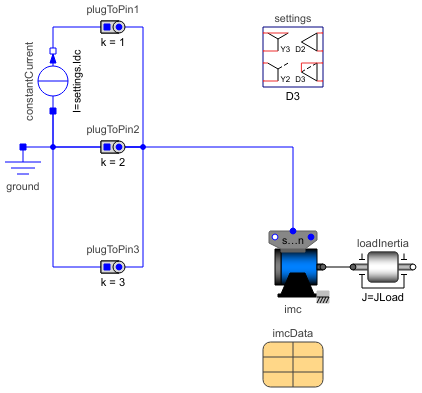
SystemModel["Modelica.Electrical.Machines.Examples.InductionMachines.IMC_DCBraking"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
The stator windings of an induction machine are fed by a DC current, causing a stationary current space phasor. Since the rotor is turning, voltage is induced in the rotor cage which in turn drives rotor currents. This creates a braking torque.
Choose a layout and plot tauElectrical and tauShaft versus wMechanical.
Default machine parameters are used.
References
| [Fischer2017] | R. Fischer, Elektrische Maschinen, 17th ed., chapter 5.3.3., Hanser, ISBN 978-3-446-45218-3, 2017. |
Parameters (4)
| w0 |
Value: 2 * pi * imcData.fsNominal / imcData.p Type: AngularVelocity (rad/s) Description: Initial mechanical speed |
|---|---|
| JLoad |
Value: 4 * imcData.Jr Type: Inertia (kg⋅m²) Description: Load's moment of inertia |
| settings |
Type: DcBrakeSettings Description: Setting for DC current braking |
| imcData |
Type: IM_SquirrelCageData Description: Common parameters for induction machines with squirrel cage |
Components (10)
| settings |
Type: DcBrakeSettings Description: Setting for DC current braking |
|
|---|---|---|
| imcData |
Type: IM_SquirrelCageData Description: Common parameters for induction machines with squirrel cage |
|
| imc |
Type: IM_SquirrelCage Description: Induction machine with squirrel cage rotor |
|
| loadInertia |
Type: Inertia Description: 1D-rotational component with inertia |
|
| terminalBox |
Type: TerminalBox Description: Terminal box Y/D-connection |
|
| plugToPin1 |
Type: PlugToPin_p Description: Connect one (positive) Pin |
|
| plugToPin2 |
Type: PlugToPin_p Description: Connect one (positive) Pin |
|
| plugToPin3 |
Type: PlugToPin_p Description: Connect one (positive) Pin |
|
| constantCurrent |
Type: ConstantCurrent Description: Source for constant current |
|
| ground |
Type: Ground Description: Ground node |