WOLFRAM SYSTEM MODELER
IMC_CharacteristicsCharacteristic curves of Induction machine with squirrel cage |
|
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Magnetic.QuasiStatic.FundamentalWave.Examples.BasicMachines.InductionMachines.IMC_Characteristics"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
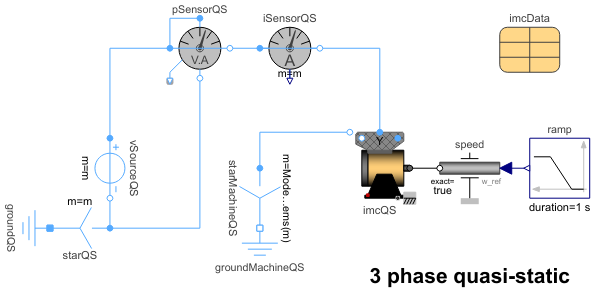
This examples allows the investigation of characteristic curves of quasi-static polyphase induction machines with squirrel cage rotor as a function of rotor speed.
Simulate for 1 second and plot (versus imcQS.wMechanical or speedPerUnit):
iSensorQS.I: (equivalent) RMS stator currentimcQS.tauElectrical: machine torqueimcQS.powerBalance.powerStator: stator powerimcQS.powerBalance.powerMechanical: mechanical power
Parameters (6)
| m |
Value: 3 Type: Integer Description: Number of phases |
|---|---|
| VsNominal |
Value: 100 Type: Voltage (V) Description: Nominal RMS voltage per phase |
| fNominal |
Value: imcData.fsNominal Type: Frequency (Hz) Description: Nominal frequency |
| w_Load |
Value: 1440.45 * 2 * Modelica.Constants.pi / 60 Type: AngularVelocity (rad/s) Description: Nominal load speed |
| p |
Value: imcData.p Type: Integer Description: Number of pole pairs |
| imcData |
Type: IM_SquirrelCageData Description: Induction machine data |
Outputs (1)
| Iqs |
Default Value: iSensorQS.I Type: Current (A) Description: QS RMS current |
|---|
Components (12)
| vSourceQS |
Type: VoltageSource Description: Constant polyphase AC voltage |
|
|---|---|---|
| starQS |
Type: Star Description: Star connection |
|
| groundQS |
Type: Ground Description: Electrical ground |
|
| pSensorQS |
Type: PowerSensor Description: Power sensor |
|
| iSensorQS |
Type: CurrentQuasiRMSSensor Description: Continuous quasi current RMS sensor for polyphase system |
|
| imcData |
Type: IM_SquirrelCageData Description: Induction machine data |
|
| imcQS |
Type: IM_SquirrelCage Description: Induction machine with squirrel cage |
|
| groundMachineQS |
Type: Ground Description: Electrical ground |
|
| starMachineQS |
Type: Star Description: Star connection |
|
| terminalBoxQS |
Type: MultiTerminalBox Description: Terminal box Y/D-connection |
|
| speed |
Type: Speed Description: Forced movement of a flange according to a reference angular velocity signal |
|
| ramp |
Type: Ramp Description: Generate ramp signal |