WOLFRAM SYSTEM MODELER
ContinuousDrive with continuous-time cascade controller |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica_Synchronous.Examples.CascadeControlledDrive.Continuous"]
Out[1]:=
Information
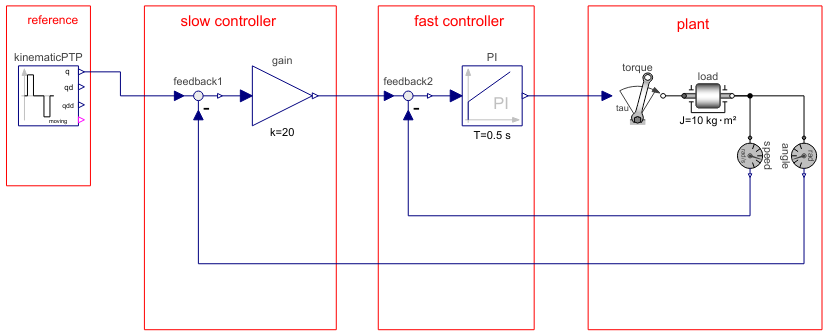
Original cascade controlled drive with a continuous-time controller.
Components (9)
| load |
Type: Inertia Description: 1D-rotational component with inertia |
|
|---|---|---|
| speed |
Type: SpeedSensor Description: Ideal sensor to measure the absolute flange angular velocity |
|
| PI |
Type: PI Description: Proportional-Integral controller |
|
| feedback2 |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| torque |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| angle |
Type: AngleSensor Description: Ideal sensor to measure the absolute flange angle |
|
| kinematicPTP |
Type: KinematicPTP2 Description: Move as fast as possible from start to end position within given kinematic constraints with output signals q, qd=der(q), qdd=der(qd) |
|
| feedback1 |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| gain |
Type: Gain Description: Output the product of a gain value with the input signal |