WOLFRAM SYSTEM MODELER
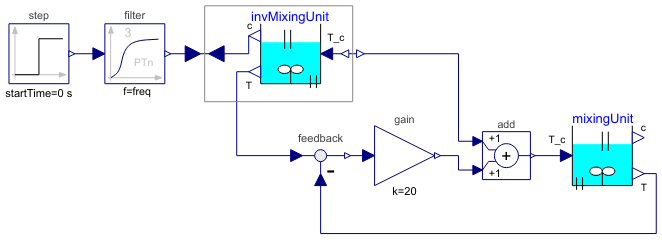
MixingUnitWithContinuousControl |
|
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica_Synchronous.Examples.Systems.Utilities.ComponentsMixingUnit.MixingUnitWithContinuousControl"]
Out[1]:=
Parameters (24)
| freq |
Value: 1 / 300 Type: Frequency Description: Critical frequency of filter |
|---|---|
| c0 |
Value: 0.848 Type: Real (mol/l) Description: Nominal concentration |
| T0 |
Value: 308.5 Type: Temperature Description: Nominal temperature |
| a1_inv |
Value: 0.2674 Type: Real |
| a21_inv |
Value: 1.815 Type: Real |
| a22_inv |
Value: 0.4682 Type: Real |
| b_inv |
Value: 1.5476 Type: Real |
| k0_inv |
Value: 1.05e14 Type: Real |
| eps |
Value: 34.2894 Type: Real |
| x10 |
Value: 0.42 Type: Real |
| x10_inv |
Value: 0.6 Type: Real |
| x20 |
Value: 0.01 Type: Real |
| u0 |
Value: -0.0224 Type: Real |
| c_start |
Value: c0 * (1 - x10) Type: Real (mol/l) |
| c_inv_start |
Value: c0 * (1 - x10_inv) Type: Real (mol/l) |
| T_start |
Value: T0 * (1 + x20) Type: Temperature |
| c_high_start |
Value: c0 * (1 - 0.72) Type: Real (mol/l) |
| T_c_start |
Value: T0 * (1 + u0) Type: Real |
| pro |
Value: 1.1 Type: Real Description: Deviations of plant to inverse plant parameters |
| a1 |
Value: a1_inv * pro Type: Real |
| a21 |
Value: a21_inv * pro Type: Real |
| a22 |
Value: a22_inv * pro Type: Real |
| b |
Value: b_inv * pro Type: Real |
| k0 |
Value: k0_inv * pro Type: Real |
Components (8)
| invMixingUnit |
Type: MixingUnit Description: Mixing unit demo from Foellinger, Nichtlineare Regelungen II, p. 280 |
|
|---|---|---|
| add |
Type: Add Description: Output the sum of the two inputs |
|
| inverseBlockConstraints |
Type: InverseBlockConstraints Description: Construct inverse model by requiring that two inputs and two outputs are identical |
|
| filter |
Type: CriticalDamping Description: Output the input signal filtered with an n-th order filter with critical damping |
|
| mixingUnit |
Type: MixingUnit Description: Mixing unit demo from Foellinger, Nichtlineare Regelungen II, p. 280 |
|
| feedback |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| step |
Type: Step Description: Generate step signal of type Real |
|
| gain |
Type: Gain Description: Output the product of a gain value with the input signal |