

ObservabilityGramian
ObservabilityGramian[ssm]
gives the observability Gramian of the state-space model ssm.
Details and Options

- The state-space model ssm can be given as StateSpaceModel[{a,b,c,d}], where a, b, c, and d represent the state, input, output, and transmission matrices in either a continuous-time or a discrete-time system:
-

continuous-time system 
discrete-time system - The observability Gramian:
-
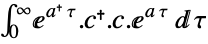
continuous-time system 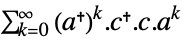
discrete-time system - For asymptotically stable systems, the Gramian
 can be computed as the solution of a Lyapunov equation:
can be computed as the solution of a Lyapunov equation: -

continuous-time system 
discrete-time system - For a StateSpaceModel with a descriptor matrix, ObservabilityGramian returns a pair of matrices {wos,wof}, where wos is associated with the slow subsystem, and wof is associated with the fast subsystem.
- The observability Gramians only exist for descriptor systems in which Det[λ e-a]≠0 for some λ.
Examples
open all close allScope (4)
Properties & Relations (7)
The observability Gramian is the controllability Gramian of the dual system:
The observability Gramian has the dimension of the state matrix:
If the observability Gramian has full rank, the system is observable:
The observability Gramian of an observable and asymptotically stable system is symmetric and positive definite:
The observability Gramian of a continuous-time (discrete-time) system satisfies a continuous (discrete) Lyapunov equation:
Descriptor systems give two observability Gramians:
The system is completely observable if and only if the sum is positive definite:
The fast and slow subsystem Gramians are computed from the Kronecker decomposition:
The slow subsystem yields a Gramian for the slow states and a zero matrix:
The fast subsystem yields a Gramian for the fast states and a zero matrix:
Inversing the Kronecker transformation gives the Gramians for the original system:
This gives the same result as using ObservabilityGramian directly:

Text
Wolfram Research (2010), ObservabilityGramian, Wolfram Language function, https://reference.wolfram.com/language/ref/ObservabilityGramian.html (updated 2012).
CMS
Wolfram Language. 2010. "ObservabilityGramian." Wolfram Language & System Documentation Center. Wolfram Research. Last Modified 2012. https://reference.wolfram.com/language/ref/ObservabilityGramian.html.
APA
Wolfram Language. (2010). ObservabilityGramian. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/ObservabilityGramian.html