

ControllableDecomposition
ControllableDecomposition[sys]
yields the controllable subsystem of the state-space model sys.
ControllableDecomposition[sys,{z1,…}]
specifies the new state variables zi.
Details and Options
- ControllableDecomposition gives {p,csys}, where p is the transformation and csys is the controllable subsystem.
- The system sys can be a standard or descriptor StateSpaceModel or AffineStateSpaceModel.
- The controllable subsystem is given by StateSpaceTransform[sys,p].
- ControllableDecomposition accepts a Method option. The following settings can be specified:
-
Automatic automatically choose the method "Matrix" use the controllability matrix "Distribution" use the controllability distribution
Examples
open all close allBasic Examples (1)
Find the controllable subsystem and its transformation:
ControllableDecomposition[StateSpaceModel[{{{Subscript[a, 1], 0, 0}, {0, Subscript[a, 2], 0},
{0, 0, Subscript[a, 3]}}, {{0}, {Subscript[b, 1]},
{Subscript[b, 2]}}, {{Subscript[c, 1], Subscript[c, 2],
Subscript[c, 3]}}, {{Subscript[d, 11]}}}, SamplingPeriod -> None,
SystemsModelLabels -> None]]Scope (4)
The controllable subsystem of a controllable system is the complete system:
ControllableDecomposition[StateSpaceModel[{{{-1, -2}, {3, -4}}, {{1}, {-1}}, {{1, 0}}, {{0}}}, SamplingPeriod -> None,
SystemsModelLabels -> None]]The controllable subsystem of a partially controllable continuous-time system:
ControllableDecomposition[StateSpaceModel[{{{-3, 0, 0}, {0, -4, 0}, {0, 0, -7}}, {{1}, {-1}, {0}}, {{1, 0, 0}}, {{0}}},
SamplingPeriod -> None, SystemsModelLabels -> None]]The controllable subsystem of a descriptor system:
ControllableDecomposition[StateSpaceModel[{{{Subscript[a, 1], 0, 0}, {0, Subscript[a, 2], 0},
{0, 0, Subscript[a, 3]}}, {{0, 0}, {Subscript[b, 1], 0},
{0, Subscript[b, 2]}}, {{0, Subscript[c, 1], 0},
{0, 0, Subscript[c, 3]}},
{{Subscript[d, 11], Subscript[d, 12]},
{Subscript[d, 21], Subscript[d, 22]}},
{{Subscript[e, 1], 0, 0}, {0, Subscript[e, 2], 0}, {0, 0, 0}}},
SamplingPeriod -> None, SystemsModelLabels -> None]]The controllable subsystem of an affine system:
asys = AffineStateSpaceModel[{{Subscript[x, 1], Subscript[x, 1],
Subscript[x, 1]}, {{1}, {1 + Subscript[x, 1]}, {1}},
{Subscript[x, 1]}, {{0}}}, {Subscript[x, 1],
Subscript[x, 2], Subscript[x, 3]}, {{Subscript[, 1], 0}},
{Automatic}, Automatic, SamplingPeriod -> None];ControllableDecomposition[asys]Specify the new state variables:
ControllableDecomposition[asys, {Subscript[z, 1], Subscript[z, 2], Subscript[z, 3]}]Applications (7)
Linear Systems (4)
Construct the Kalman controllable decomposition:
ssm = StateSpaceModel[{{{Subscript[a, 1], 0, 0}, {0, Subscript[a, 2], 0},
{0, 0, Subscript[a, 3]}}, {{0, 0}, {Subscript[b, 1], 0},
{0, Subscript[b, 2]}}, {{Subscript[c, 1], 0, 0},
{0, 0, Subscript[c, 3]}},
{{Subscript[d, 11], Subscript[d, 12]},
{Subscript[d, 21], Subscript[d, 22]}}}, SamplingPeriod -> None,
SystemsModelLabels -> None];ControllableDecomposition picks out the controllable subsystem only:
{p, cssm} = ControllableDecomposition[ssm];cssmKalman controllable decomposition puts the controllable subsystem first and keeps the rest:
po = NullSpace[p];
StateSpaceTransform[ssm, ArrayFlatten[{{p, po}}]]Compute the dimension of the controllable subspace:
{p, cssm} = ControllableDecomposition[StateSpaceModel[{{{Subscript[a, 1], 0, 0}, {0, Subscript[a, 2], 0},
{0, 0, Subscript[a, 3]}}, {{0, 0}, {Subscript[b, 1], 0},
{0, Subscript[b, 2]}}, {{Subscript[c, 1], 0, 0},
{0, 0, Subscript[c, 3]}},
{{Subscript[d, 11], Subscript[d, 12]},
{Subscript[d, 21], Subscript[d, 22]}}}, SamplingPeriod -> None,
SystemsModelLabels -> None]];The controllable subspace is the range of p, i.e. the column dimension:
Dimensions[p]//LastFind the controllable subspace for the system below and explain the possible state trajectories that can occur in the system:
ssm = StateSpaceModel[{{{1, -1, -3}, {-3, -1, 3}, {5, -1, -7}}, {{0}, {0}, {-1}}, {{1, -1, -1}}, {{0}}},
SamplingPeriod -> None, SystemsModelLabels -> None];The system is uncontrollable, so only a subspace is controllable:
ControllableModelQ[ssm]The range of the transformation matrix p gives the controllable subspace:
{p, csys} = ControllableDecomposition[ssm];cspace = ParametricPlot3D[p.{u, v}, {u, -1.25, 1.25}, {v, -1, 1}, Mesh -> None, PlotStyle -> Opacity[0.3]]Trajectories can be controlled in this subspace:
x0 = Flatten[Table[p.{u, v}, {u, -0.8, 0.8, 0.3}, {v, -0.8, 0.8, 0.3}], 1];
sr = Table[StateResponse[{ssm, x}, Sin[2t], {t, 0, 10}], {x, x0}];Show[ParametricPlot3D[Evaluate[sr], {t, 0, 10}], cspace]But you cannot control the drift between parallel copies of the controllable subspace:
w = First@NullSpace[p]; (* Orthogonal direction to cspace *)
x0 = Flatten[Table[p.{u, v} - w, {u, -0.8, 0.8, 0.3}, {v, -0.8, 0.8, 0.3}], 1];
sr = Table[StateResponse[{ssm, x}, Sin[2t], {t, 0, 10}], {x, x0}];Show[ParametricPlot3D[Evaluate[sr], {t, 0, 10}], cspace]Design a controller for a system that is not completely controllable, by building a controller for the controllable subsystem:
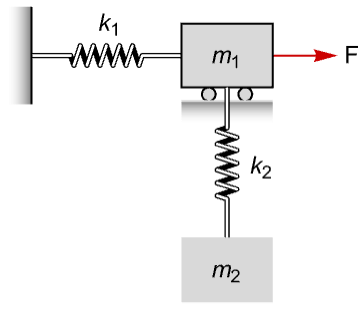
Since a force applied only on the first mass ![]() , the second mass
, the second mass ![]() is not controllable:
is not controllable:
pars = {Subscript[k, 1] -> 75, Subscript[k, 2] -> 100, Subscript[m, 1] -> 1, Subscript[m, 2] -> 0.5};ssm = StateSpaceModel[{{{0, 1, 0, 0, 0, 0},
{-(Subscript[k, 1] + Subscript[k, 2])/Subscript[m, 1], 0,
Subscript[k, 2]/Subscript[m, 1], 0, 0, 0}, {0, 0, 0, 1, 0, 0},
{Subscript[k, 2]/Subscript[m, 2], 0,
-Subscript[k, 2]/Subscript[m, 2], 0, 0, 0}, {0, 0, 0, 0, 0, 1},
{0, 0, 0, 0, -Subscript[k, 2]/Subscript[m, 2], 0}},
{{0}, {Subscript[m, 1]^(-1)}, {0}, {0}, {0}, {0}},
{{1, 0, 0, 0, 0, 0}, {0, 0, 1, 0, 0, 0}}, {{0}, {0}}},
{{Subscript[y, 2][t], 0}, Subscript[, 1],
{Subscript[x, 1][t], 0}, Subscript[, 2],
{Subscript[x, 2][t], 0}, Subscript[, 3]},
{{F[t], 0}}, {Subscript[x, 1][t],
Subscript[x, 2][t]}, t, SamplingPeriod -> None,
SystemsModelLabels -> None] /. pars;ControllableModelQ[ssm]Design a controller using the controllable subsystem:
{p, csys} = ControllableDecomposition[ssm];κc = StateFeedbackGains[csys, {-1, -2, -3 + I, -3 - I}]Use the transformation to obtain the controller for the original system:
κ = κc.pThe simulation shows controlled as well as oscillatory modes in the closed-loop system:
clsys = SystemsModelStateFeedbackConnect[ssm, κ];Plot[Evaluate[StateResponse[{clsys, {0, 0, 0.1, 0, 0.1, 0}}, 0, {t, 0, 7}]], {t, 0, 7}]Compute the modes of the closed-loop system:
Eigenvalues[First[Normal[clsys]]]The oscillatory modes are the uncontrollable ones:
Select[Eigenvalues[First[Normal[ssm]]], !ControllableModelQ[{ssm, #}]&]Affine Systems (3)
Construct the triangular controllability decomposition:
assm = AffineStateSpaceModel[{{1, 0, Subscript[x, 2]}, {{1}, {Subscript[x, 2]},
{Subscript[x, 1]}}, {Subscript[x, 1]}, {{0}}},
{Subscript[x, 1], Subscript[x, 2], Subscript[x, 3]},
{Subscript[, 1]}, {Automatic}, Automatic, SamplingPeriod -> None];ControllableDecomposition picks out the controllable subsystem only:
{{p1, p2}, csys} = ControllableDecomposition[assm];csysTriangular controllability decomposition puts the controllable subsystem first and keeps the rest:
StateSpaceTransform[assm, {p1, Flatten[p2]}]Compute the dimension of the controllable subspace:
assm = AffineStateSpaceModel[{{Subscript[x, 1], Subscript[x, 1],
Subscript[x, 1]}, {{1}, {1 + Subscript[x, 1]}, {1}},
{Subscript[x, 1]}, {{0}}}, {Subscript[x, 1],
Subscript[x, 2], Subscript[x, 3]}, {{Subscript[, 1], 0}},
{Automatic}, Automatic, SamplingPeriod -> None];ControllableModelQ[assm]The dimension can be obtained from the inverse transformation ![]() :
:
{{Subscript[p, 1], Subscript[p, 2]}, cssm} = ControllableDecomposition[assm];cssmLength[First[Subscript[p, 2]]]The controllable decomposition gives the reachable subspace and subsystem. This can be used to visualize the motion of the system from one subspace to another:
asys = AffineStateSpaceModel[{{1, 0, Subscript[x, 2]}, {{1}, {Subscript[x, 2]},
{Subscript[x, 1]}}, {Subscript[x, 1]}, {{0}}},
{Subscript[x, 1], Subscript[x, 2], Subscript[x, 3]},
{Subscript[, 1]}, {Automatic}, Automatic, SamplingPeriod -> None];The generic reachable subspace:
{{Subscript[p, 1], {Subscript[p, 21], Subscript[p, 22]}}, csys} = ControllableDecomposition[asys];rspace[{x1_, x2_, x3_}] := Last /@ Subscript[p, 22] /. {Subscript[x, 1] -> x1, Subscript[x, 2] -> x2, Subscript[x, 3] -> x3}rspace[{Subscript[x, 1], Subscript[x, 2], Subscript[x, 3]}]A specific reachable subspace:
c = 0.2;rspace0 = ContourPlot3D[Evaluate[rspace[{Subscript[x, 1], Subscript[x, 2], Subscript[x, 3]}] == c], {Subscript[x, 1], 1, 5}, {Subscript[x, 2], 0, 5.5}, {Subscript[x, 3], -7, 7}, Mesh -> None, ContourStyle -> Opacity[0.3]]Select several initial points on this surface:
Subscript[x, 10] = Range[1.5, 3, 0.05];Flatten[Subscript[x, 2] /. Solve[Thread[Last /@ Subscript[p, 22] == c], Subscript[x, 2]] /. Subscript[x, 1] -> Subscript[x, 10]];Subscript[x, 0] = Thread[{Subscript[x, 10], %, RandomReal[{-1.5, 6.5}, Length@Subscript[x, 10]]}];Short[Subscript[x, 0], 2]All these initial points end up at exactly the same final surface because that motion is not controllable:
sr = Table[StateResponse[{asys, x}, 0, {t, 0, 1}], {x, Subscript[x, 0]}];Subscript[x, f] = rspace /@ sr /. t -> 1;Differences[%]//ChopA 3D plot shows the motion from the initial surface to the final one:
rspace1 = ContourPlot3D[Evaluate[rspace[{Subscript[x, 1], Subscript[x, 2], Subscript[x, 3]}] == Subscript[x, f][[1, 1]]], {Subscript[x, 1], 1, 5}, {Subscript[x, 2], 0.5, 5}, {Subscript[x, 3], -10, 10}, Mesh -> None, ContourStyle -> Opacity[0.3]];Show[rspace0, ParametricPlot3D[Evaluate[sr], {t, 0, 1}], rspace1, PlotRange -> All]Properties & Relations (2)
The transformation matrix p selects the controllable subsystem using StateSpaceTransform:
ssm = StateSpaceModel[{{{Subscript[a, 1], 0, 0}, {0, Subscript[a, 2], 0},
{0, 0, Subscript[a, 3]}}, {{0, 0}, {Subscript[b, 1], 0},
{0, Subscript[b, 2]}}, {{Subscript[c, 1], 0, 0},
{0, 0, Subscript[c, 3]}},
{{Subscript[d, 11], Subscript[d, 12]},
{Subscript[d, 21], Subscript[d, 22]}}}, SamplingPeriod -> None,
SystemsModelLabels -> None];{p, csys} = ControllableDecomposition[ssm];
tsys = StateSpaceTransform[ssm, {p, p}];{csys, tsys}For affine systems, the transformation rules select the controllable subsystem:
assm = AffineStateSpaceModel[{{-Subscript[x, 4], 0, -Subscript[x, 1],
Subscript[x, 2]}, {{1}, {0}, {1 + Subscript[x, 2]}, {0}},
{Subscript[x, 1], Subscript[x, 2]}, {{0}, {0}}},
{Subscript[x, 1], Subscript[x, 2], Subscript[x, 3],
Subscript[x, 4]}, {Subscript[, 1]}, {Automatic, Automatic}, Automatic,
SamplingPeriod -> None];{p, csys} = ControllableDecomposition[assm];
tsys = StateSpaceTransform[assm, p];{csys, tsys}Text
Wolfram Research (2010), ControllableDecomposition, Wolfram Language function, https://reference.wolfram.com/language/ref/ControllableDecomposition.html (updated 2014).
CMS
Wolfram Language. 2010. "ControllableDecomposition." Wolfram Language & System Documentation Center. Wolfram Research. Last Modified 2014. https://reference.wolfram.com/language/ref/ControllableDecomposition.html.
APA
Wolfram Language. (2010). ControllableDecomposition. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/ControllableDecomposition.html