WOLFRAM SYSTEM MODELER
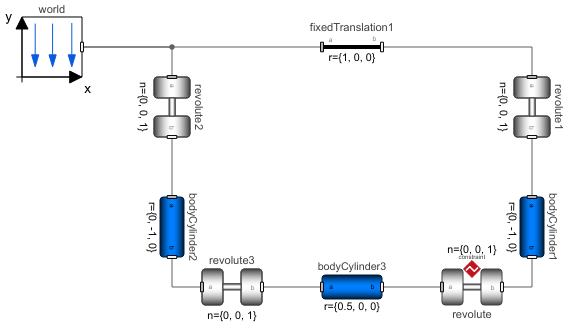
PlanarLoopThree cylinders and a fixed translation connected in a planar loop |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Tutorial.MultiBody.PlanarLoop"]
Out[1]:=
Information
This example is used in the tutorial Multibody Modeling.
The model may contain stylistic improvements compared to the model obtained by following the steps in the tutorial. Examples of stylistic improvements include the use of description strings, model plots, icons, and documentation.
Components (9)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| revolute1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| revolute2 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| revolute3 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| revolute |
Type: RevolutePlanarLoopConstraint Description: Revolute joint that is described by 2 positional constraints for usage in a planar loop (the ambiguous cut-force perpendicular to the loop and the ambiguous cut-torques are set arbitrarily to zero) |
|
| fixedTranslation1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| bodyCylinder1 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| bodyCylinder2 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| bodyCylinder3 |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |