WOLFRAM SYSTEM MODELER
CoupledClutchesModelExample studing the effect of four inertias separated by clutches. |
|
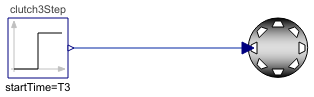
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.MechanicalEngineering.CoupledClutches.CoupledClutchesModel"]
Out[1]:=
Information
By coupling clutches together, a variable structure drivetrain can be achieved. With different clutches engaged at different times, torque is supplied to different parts of the system.
Simulation
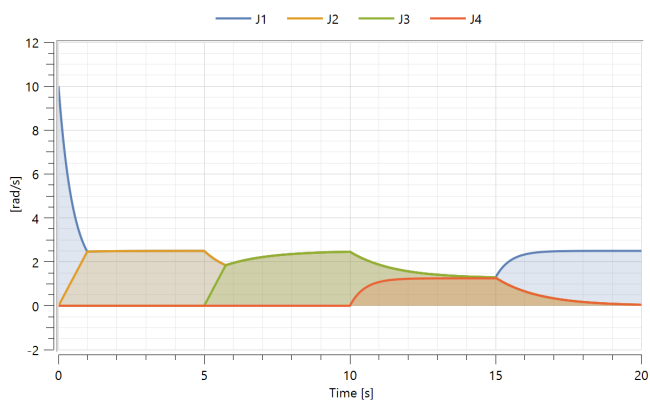
Simulating the model allows you to look at how the different inertia components behave over time, and how they are affected by each other.
To simulate the model in System Modeler, click the Simulate button: 
When the simulation is finished and Simulation Center has been opened, you can analyze the result by clicking the various states or Model Plots to the left of the Simulation Center window. For example, Angular velocities shows the angular velocities of the inertia components over time, while Clutch1 engagement velocities shows the relative velocities of the first and the second inertia components, as well as the force applied to the clutch between them.
To analyze the model based on a different parameter set than the default, select the state you want to edit in the Model Center and change the desired initial value under Parameters in the General tab. It can also be done directly from Simulation Center, under the Parameters tab. Changing the d parameter will change the damping on the first and the last inertia components, for example.
In order to get the full experience of this example, you need a desktop Wolfram Language product. A free trial download is available at www.wolfram.com/mathematica/trial/
For the full example, open the accompanying notebook CoupledClutches.nb.
Parameters (5)
| T1 |
Value: 15 Type: Time (s) Description: Time when clutch1 is disengaged |
|---|---|
| T2 |
Value: 5 Type: Time (s) Description: Time when clutch2 is invoked |
| T3 |
Value: 10 Type: Time (s) Description: Time when clutch3 is invoked |
| d |
Value: 2 Type: RotationalDampingConstant (N⋅m⋅s/rad) Description: Damping constant |
| tau |
Value: 5 Type: Torque (N⋅m) Description: Input torque |