WOLFRAM SYSTEM MODELER
PartialControlScenarioModel of a LEGO Segway without a controller keeping it upright |
|
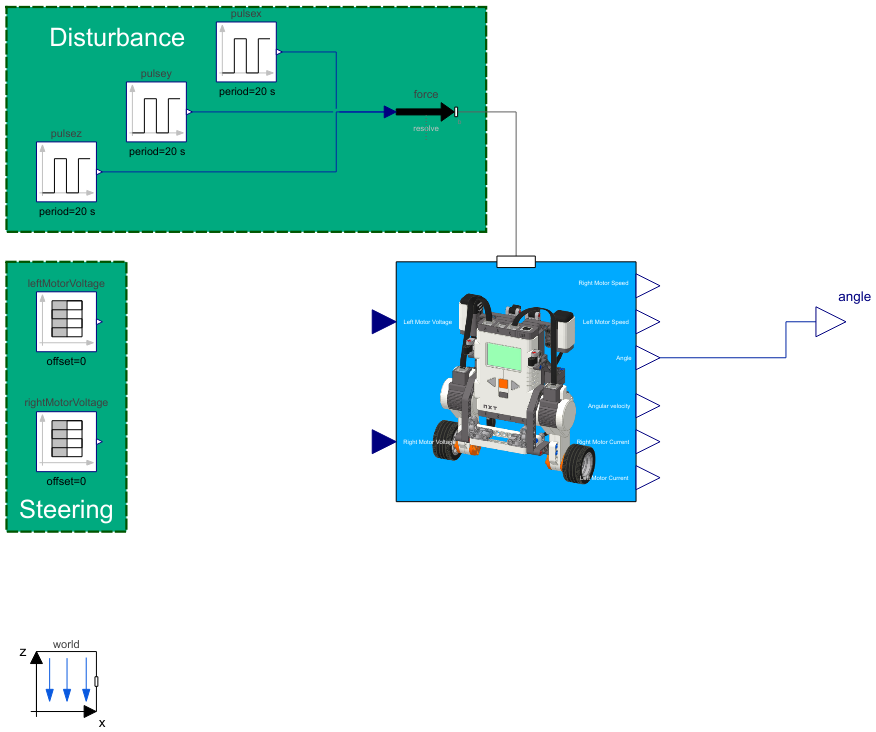
Diagram
Wolfram Language
In[1]:=

SystemModel["EducationExamples.MechanicalEngineering.LEGOSegway.Components.PartialControlScenario"]
Out[1]:=
Information
This partial model is used to set up the base control experiments for the LEGO Segway model.
Parameters (2)
Connectors (1)
| angle |
Type: RealOutput Description: 'output Real' as connector |
|---|
Components (8)
| segway |
Type: LEGOSegwayModel Description: Contains a model of a LEGO Segway with some extra inputs and outputs |
|
|---|---|---|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| force |
Type: WorldForce Description: External force acting at frame_b, defined by 3 input signals and resolved in frame world, frame_b or frame_resolve |
|
| pulsex |
Type: Pulse Description: Generate pulse signal of type Real |
|
| pulsey |
Type: Pulse Description: Generate pulse signal of type Real |
|
| pulsez |
Type: Pulse Description: Generate pulse signal of type Real |
|
| leftMotorVoltage |
Type: TimeTable Description: Generate a (possibly discontinuous) signal by linear interpolation in a table |
|
| rightMotorVoltage |
Type: TimeTable Description: Generate a (possibly discontinuous) signal by linear interpolation in a table |