WOLFRAM SYSTEM MODELER
PIDControlledCraneCrab crane with PID-controller |
|
Diagram
Wolfram Language
In[1]:=

SystemModel["EducationExamples.MechanicalEngineering.ModelInversionControl.PIDControlledCrane"]
Out[1]:=
Information
Library Dependency
This model requires the PlanarMechanics library.
- The free PlanarMechanics library was created especially for modeling multibody systems with two-dimensional mechanical components. Compared to the MultiBody library, currently available in the Modelica Standard Library, it is simpler to use and it is more optimized to planar modeling. Planar models of mechanical systems are useful in many different applications, for example, in contact problems that are more easily modeled in 2D than in 3D.
Model
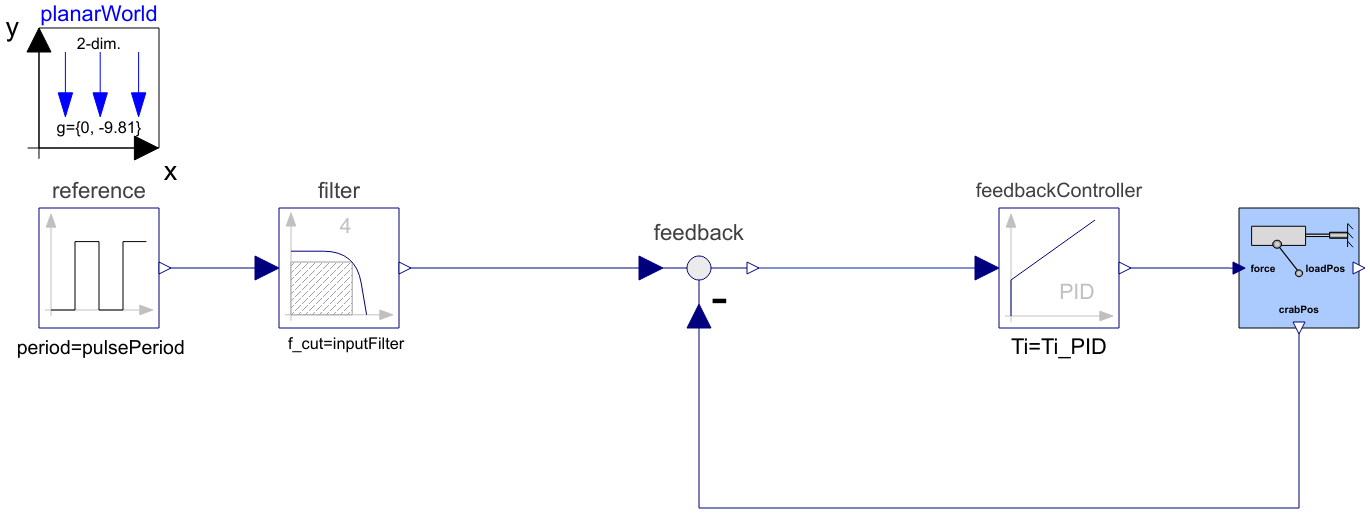
Alternative control scheme from the InversionControlledCrane model. Uses a PID Controller that has been tuned using the accompanying Wolfram Language notebook.
In order to get the full experience of this example, you need a desktop Wolfram Language product. A free trial download is available at www.wolfram.com/mathematica/trial/
For the full example, open the accompanying notebook ModelInversionControl.nb.
Parameters (7)
| pulsePeriod |
Value: 20 Type: Time (s) Description: Period of the input pulse, position switches every half period |
|---|---|
| inputFilter |
Value: 0.2 Type: Frequency (Hz) Description: Cut-off frequency of the input filter, higher values give sharper movement |
| crane_I |
Value: 0.5 Type: Inertia (kg⋅m²) Description: Inertia of the physical crane body |
| k_PID |
Value: 292.758 Type: Real Description: Proportional gain of corrective controller |
| Ti_PID |
Value: 2.06238 Type: Real Description: Time constant of integrative part of corrective controller |
| Td_PID |
Value: 0.919468 Type: Real Description: Time constant of derivative part of corrective controller |
| initType |
Value: Modelica.Blocks.Types.Init.SteadyState Type: Init Description: Type of initialization used for PID controller |
Components (6)
| filter |
Type: Filter Description: Input signal filter, smoothing the signal. |
|
|---|---|---|
| reference |
Type: Pulse Description: Load position reference, going back and forth between 0 and 1 meters along the X-axis. |
|
| planarWorld |
Type: PlanarWorld Description: Coordinate system. |
|
| crane |
Type: CraneCrabDamped Description: Crab crane setup. |
|
| feedback |
Type: Feedback Description: Corrective closed loop feedback of crane position |
|
| feedbackController |
Type: PID Description: Corrective PID-controller |