WOLFRAM SYSTEM MODELER
CraneCrabDampedA model of a simple crane crab where the revolute joint has been removed so that the crab position is always identical to the load position |
|
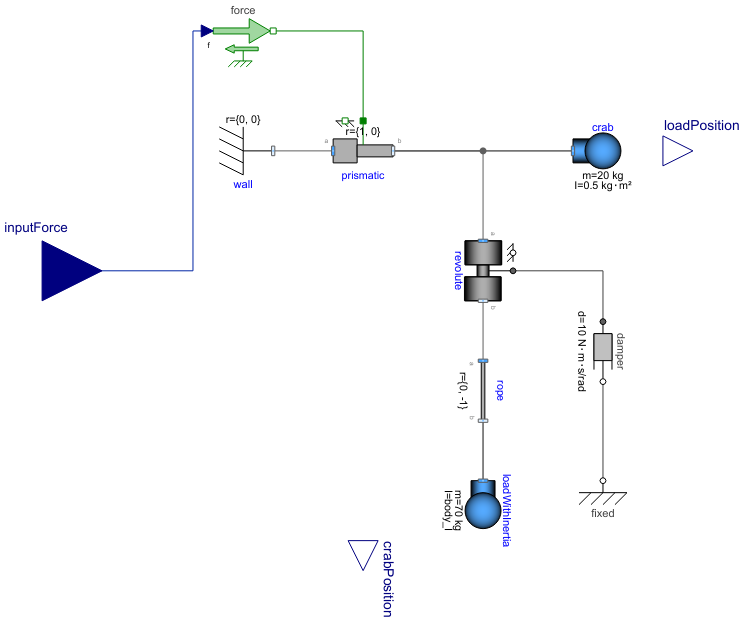
Diagram
Wolfram Language
In[1]:=

SystemModel["EducationExamples.MechanicalEngineering.ModelInversionControl.Components.CraneCrabDamped"]
Out[1]:=
Information
The hoist crane is modeled using the PlanarMechanics Modelica library. Force is applied to a prismatic joint that pushes a crab along a one-dimensional beam. Attached to the crab is a dampened revolute joint that connects to the load through a stiff rod.
Parameters (2)
| body_I |
Value: 0.5 Type: Inertia (kg⋅m²) Description: Interia of the crane body |
|---|---|
| animateCrane |
Value: false Type: Boolean Description: Animation flag |
Connectors (3)
| loadPosition |
Type: RealOutput Description: Position of the load |
|
|---|---|---|
| crabPosition |
Type: RealOutput Description: Position of the crab |
|
| inputForce |
Type: RealInput Description: Force signal (in newtons) to be applied on the crab |
Components (9)
| loadWithInertia |
Type: Body Description: Load on the crane. |
|
|---|---|---|
| rope |
Type: FixedTranslation Description: Stiff rope supporting the load. |
|
| wall |
Type: Fixed Description: Prismatic join fixture. |
|
| prismatic |
Type: Prismatic Description: Crab crane movement along X-axis. |
|
| crab |
Type: Body Description: Crab moving along the gantry. |
|
| force |
Type: Force Description: Force applied on the crab crane. |
|
| revolute |
Type: Revolute Description: Crab-crane relative angle. |
|
| fixed |
Type: Fixed Description: Damper fixture. |
|
| damper |
Type: Damper Description: Damper to remove oscillations. |
Used in Examples (1)
|
EducationExamples.MechanicalEngineering.ModelInversionControl Crab crane with a model inversion control setup |
Used in Components (1)
|
EducationExamples.MechanicalEngineering.ModelInversionControl.Components Partial model for the controlled crane setup |