WOLFRAM SYSTEM MODELER
RevoluteA revolute joint |
|
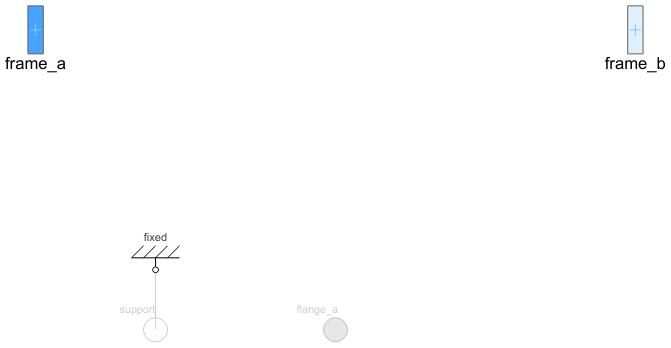
Diagram
Wolfram Language
In[1]:=
SystemModel["PlanarMechanics.Joints.Revolute"]
Out[1]:=
Information
Joint of in-plane rotation of frame_b relative to frame_a.
The two frames coincide when the rotation angle phi = 0°.
Optionally, two additional one-dimensional mechanical flanges (flange
flange_a represents the driving flange and flange
support represents the bearing) can be enabled via
parameter useFlange. The enabled flange_a
flange can be driven with elements of the
Modelica.Mechanics.Rotational
library.
In the "Initialization" block, angular position phi,
angular velocity w as well as angular
acceleration z can be initialized.
It can be defined via parameter (in "Advanced" tab)
stateSelect that the relative angle phi
and its derivative shall be definitely used as states by setting
stateSelect = StateSelect.always.
In "Animation" group, animation parameters for this model can be set,
where zPosition represents the model's position along
the z axis in 3D animation. Some of the values can be preset
by an outer PlanarWorld
model.
Parameters (7)
| useFlange |
Value: false Type: Boolean Description: = true, if force flange enabled, otherwise implicitly grounded |
|---|---|
| animate |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
| stateSelect |
Value: StateSelect.default Type: StateSelect Description: Priority to use phi and w as states |
| zPosition |
Value: planarWorld.defaultZPosition Type: Length (m) Description: Position z of cylinder representing the joint axis |
| cylinderLength |
Value: planarWorld.defaultJointLength Type: Distance (m) Description: Length of cylinder representing the joint axis |
| cylinderDiameter |
Value: planarWorld.defaultJointWidth Type: Distance (m) Description: Diameter of cylinder representing the joint axis |
| extraLine |
Value: false Type: Boolean Description: Enable black line in the cylinder to show the joint rotation |
Inputs (2)
| cylinderColor |
Default Value: Types.Defaults.JointColor Type: Color Description: Color of cylinder representing the joint axis |
|---|---|
| specularCoefficient |
Default Value: planarWorld.defaultSpecularCoefficient Type: SpecularCoefficient Description: Reflection of ambient light (= 0: light is completely absorbed) |
Connectors (4)
| frame_a |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque |
|
|---|---|---|
| frame_b |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque |
|
| flange_a |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
| support |
Type: Flange_b Description: 1-dim. rotational flange of the drive support (assumed to be fixed in the world frame, NOT in the joint) |
Components (3)
| planarWorld |
Type: PlanarWorld Description: Planar world model |
|
|---|---|---|
| cylinder |
Type: Shape Description: Visualizing an elementary object with variable size; all data have to be set as modifiers (see info layer) |
|
| fixed |
Type: Fixed Description: support flange is fixed to ground |
Used in Examples (21)
|
PlanarMechanics.Examples A free swinging pendulum |
|
|
PlanarMechanics.Examples A swinging pendulum excited by a world force |
|
|
PlanarMechanics.Examples Simple double pendulum with two revolute joints and two bodies |
|
|
PlanarMechanics.Examples Measure demo |
|
|
PlanarMechanics.Examples Power and distance sensor demo |
|
|
PlanarMechanics.Examples A damped crane crab |
|
|
PlanarMechanics.Examples A controlled crane crab |
|
|
PlanarMechanics.Examples An inverted model of a pendulum |
|
|
PlanarMechanics.Examples An example of a kinematic loop (manual state selection) |
|
|
KinematicLoop_DynamicStateSelection PlanarMechanics.Examples An example of a kinematic loop |
|
|
PlanarMechanics.Examples A piston engine (manual state selection) |
|
|
PistonEngine_DynamicStateSelection PlanarMechanics.Examples A piston engine |
|
|
PlanarMechanics.Examples A pendulum mounted on an ideal rolling wheel |
|
|
PlanarMechanics.Examples A damped crane crab |
|
|
PlanarMechanics.GearComponents.Examples Rigid spur gear |
|
|
PlanarMechanics.VehicleComponents.Examples Test air drag model |
|
|
PlanarMechanics.VehicleComponents.Examples Test an ideal wheel |
|
|
PlanarMechanics.VehicleComponents.Examples Dry friction wheel |
|
|
PlanarMechanics.VehicleComponents.Examples A slip-based wheel |
|
|
PlanarMechanics.VehicleComponents.Examples Single track model |
|
|
PlanarMechanics.VehicleComponents.Examples Double track model |
Used in Components (1)
|
PlanarMechanics.GearComponents.Examples.Utilities Planetary gearbox |
Revisions
 Developed 2010 at the DLR Institute of System Dynamics and Control
Developed 2010 at the DLR Institute of System Dynamics and Control