WOLFRAM SYSTEM MODELER
RigidNoLossPlanetaryPlanetary gearbox |
|
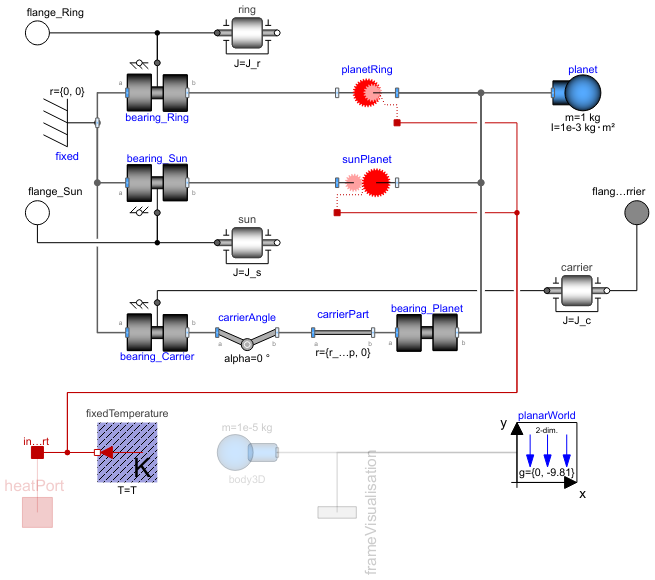
Diagram
Wolfram Language
In[1]:=
SystemModel["PlanarMechanics.GearComponents.Examples.Utilities.RigidNoLossPlanetary"]
Out[1]:=
Information
This model is a model of a standard planetary gearbox. The inertia of all gear models, as well as the mass of the planetary gear can be entered to get the behaviour of a complete planetary gear. In this example only one planet is used as the gearbox models are rigid.
Parameters (16)
| useHeatPort |
Value: false Type: Boolean Description: = true, if HeatPort is enabled |
|---|---|
| T |
Value: 293.15 Type: Temperature (K) Description: Fixed device temperature if useHeatPort = false |
| r_s |
Type: Distance (m) Description: Radius of sun gear |
| r_p |
Type: Distance (m) Description: Radius of planet gear |
| r_r |
Type: Distance (m) Description: Radius of ring gear |
| J_s |
Type: Inertia (kg⋅m²) Description: Inertia of the sun gear |
| J_p |
Type: Inertia (kg⋅m²) Description: Inertia of the planet gear |
| J_c |
Type: Inertia (kg⋅m²) Description: Inertia of the carrier |
| J_r |
Type: Inertia (kg⋅m²) Description: Inertia of the ring gear |
| animate |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
| Tooth_a |
Value: 20 Type: Integer Description: Number of teeth |
| RGB_s |
Value: {195, 0, 0} Type: Real[3] Description: Color (RGB values) |
| RGB_p |
Value: {0, 195, 195} Type: Real[3] Description: Color (RGB values) |
| RGB_r |
Value: {0, 0, 195} Type: Real[3] Description: Color (RGB values) |
| z_offset |
Value: 0 Type: Distance (m) Description: Offset of z-distance for simulation |
| connectToMultiBody |
Value: false Type: Boolean |
Connectors (5)
| heatPort |
Type: HeatPort_a Description: Optional port to which dissipated losses are transported in form of heat |
|
|---|---|---|
| flange_Ring |
Type: Flange_b Description: Flange of shaft |
|
| flange_Sun |
Type: Flange_b Description: Flange of shaft |
|
| flange_Carrier |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
| frameVisualisation |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
Components (16)
| fixedTemperature |
Type: FixedTemperature Description: Fixed temperature boundary condition in Kelvin |
|
|---|---|---|
| sun |
Type: Inertia Description: 1D-rotational component with inertia |
|
| ring |
Type: Inertia Description: 1D-rotational component with inertia |
|
| planet |
Type: Body Description: Body component with mass and inertia |
|
| carrier |
Type: Inertia Description: 1D-rotational component with inertia |
|
| planetRing |
Type: RigidNoLossInternal Description: Internal rigid gear connection model |
|
| sunPlanet |
Type: RigidNoLossExternal Description: External rigid gear connection model |
|
| bearing_Sun |
Type: Revolute Description: A revolute joint |
|
| bearing_Ring |
Type: Revolute Description: A revolute joint |
|
| bearing_Planet |
Type: Revolute Description: A revolute joint |
|
| bearing_Carrier |
Type: Revolute Description: A revolute joint |
|
| carrierAngle |
Type: FixedRotation Description: A fixed translation between two components (rigid rod) |
|
| carrierPart |
Type: FixedTranslation Description: A fixed translation between two components (rigid rod) |
|
| fixed |
Type: Fixed Description: Frame fixed in the planar world frame at a given position and orientation |
|
| planarWorld |
Type: PlanarWorldIn3D Description: Planar world coordinate system + gravity field + default animation definition |
|
| body3D |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
Used in Examples (1)
|
PlanarMechanics.GearComponents.Examples Rigid planetary gearbox |
Revisions
 Developed 2010 at the DLR Institute of System Dynamics and Control
Developed 2010 at the DLR Institute of System Dynamics and Control