WOLFRAM SYSTEM MODELER
TestSlipBasedWheelA slip-based wheel |
|
Diagram
Wolfram Language
In[1]:=
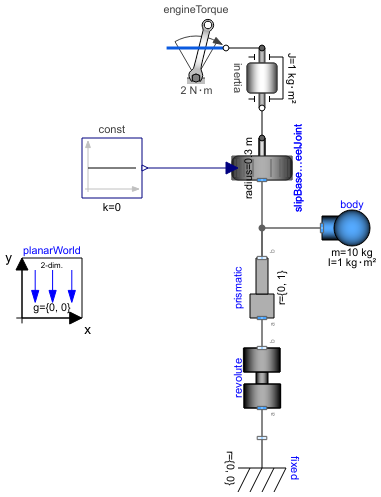
SystemModel["PlanarMechanics.VehicleComponents.Examples.TestSlipBasedWheel"]
Out[1]:=
Information
Selected continuous time states
- inertia.phi
- inertia.w
- prismatic.s
- prismatic.v
- revolute.phi
- revolute.w
Components (9)
| slipBasedWheelJoint |
Type: SlipBasedWheelJoint Description: Slip-Friction based wheel joint |
|
|---|---|---|
| prismatic |
Type: Prismatic Description: A prismatic joint |
|
| revolute |
Type: Revolute Description: A revolute joint |
|
| fixed |
Type: Fixed Description: Frame fixed in the planar world frame at a given position and orientation |
|
| engineTorque |
Type: ConstantTorque Description: Constant torque, not dependent on speed |
|
| body |
Type: Body Description: Body component with mass and inertia |
|
| inertia |
Type: Inertia Description: 1D-rotational component with inertia |
|
| const |
Type: Constant Description: Generate constant signal of type Real |
|
| planarWorld |
Type: PlanarWorld Description: Planar world coordinate system + gravity field + default animation definition |
Revisions
 Developed 2010 at the DLR Institute of System Dynamics and Control
Developed 2010 at the DLR Institute of System Dynamics and Control