WOLFRAM SYSTEM MODELER
TwoTrackWithDifferentialGearDouble track model |
|
Diagram
Wolfram Language
In[1]:=

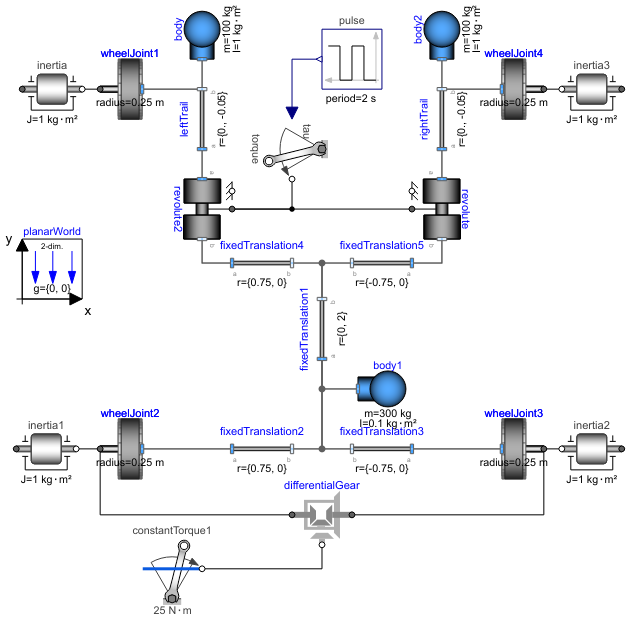
SystemModel["PlanarMechanics.VehicleComponents.Examples.TwoTrackWithDifferentialGear"]
Out[1]:=
Information
A double track model of a car.
Selected continuous time states
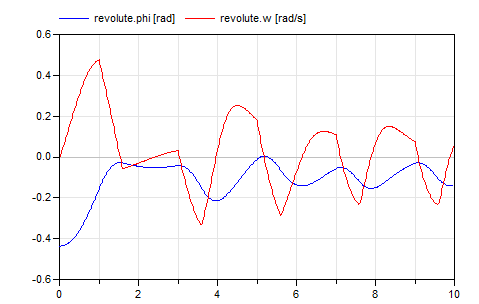
- actuatedRevolute.phi
- actuatedRevolute.w
- body.v[1]
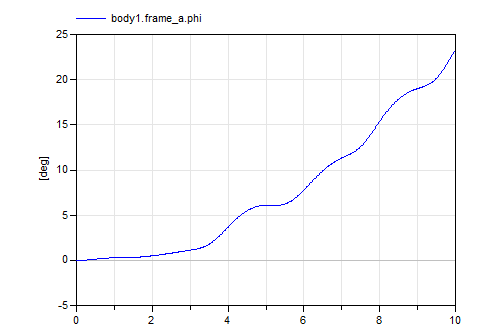
- body1.frame_a.phi
- body1.r[1]
- body1.r[2]
- body1.w
- body2.v[2]
- inertia.phi
- inertia.w
- inertia1.phi
- inertia1.w
- inertia2.phi
- inertia2.w
- inertia3.phi
- inertia3.w
Components (25)
| body |
Type: Body Description: Body component with mass and inertia |
|
|---|---|---|
| body1 |
Type: Body Description: Body component with mass and inertia |
|
| body2 |
Type: Body Description: Body component with mass and inertia |
|
| wheelJoint1 |
Type: DryFrictionWheelJoint Description: Dry-Friction based wheel joint |
|
| wheelJoint2 |
Type: DryFrictionWheelJoint Description: Dry-Friction based wheel joint |
|
| wheelJoint3 |
Type: DryFrictionWheelJoint Description: Dry-Friction based wheel joint |
|
| wheelJoint4 |
Type: DryFrictionWheelJoint Description: Dry-Friction based wheel joint |
|
| differentialGear |
Type: DifferentialGear Description: Simple Model of a differential gear |
|
| pulse |
Type: Pulse Description: Generate pulse signal of type Real |
|
| torque |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| constantTorque1 |
Type: ConstantTorque Description: Constant torque, not dependent on speed |
|
| inertia |
Type: Inertia Description: 1D-rotational component with inertia |
|
| inertia1 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| inertia2 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| inertia3 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| fixedTranslation1 |
Type: FixedTranslation Description: A fixed translation between two components (rigid rod) |
|
| fixedTranslation2 |
Type: FixedTranslation Description: A fixed translation between two components (rigid rod) |
|
| fixedTranslation3 |
Type: FixedTranslation Description: A fixed translation between two components (rigid rod) |
|
| fixedTranslation4 |
Type: FixedTranslation Description: A fixed translation between two components (rigid rod) |
|
| fixedTranslation5 |
Type: FixedTranslation Description: A fixed translation between two components (rigid rod) |
|
| leftTrail |
Type: FixedTranslation Description: A fixed translation between two components (rigid rod) |
|
| rightTrail |
Type: FixedTranslation Description: A fixed translation between two components (rigid rod) |
|
| revolute |
Type: Revolute Description: A revolute joint |
|
| revolute2 |
Type: Revolute Description: A revolute joint |
|
| planarWorld |
Type: PlanarWorld Description: Planar world coordinate system + gravity field + default animation definition |
Revisions
 Developed 2010 at the DLR Institute of System Dynamics and Control
Developed 2010 at the DLR Institute of System Dynamics and Control