WOLFRAM SYSTEM MODELER
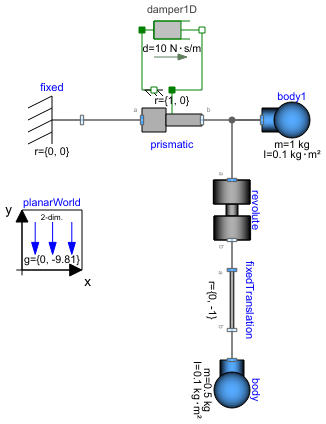
CraneCrabA damped crane crab |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["PlanarMechanics.Examples.CraneCrab"]
Out[1]:=
Information
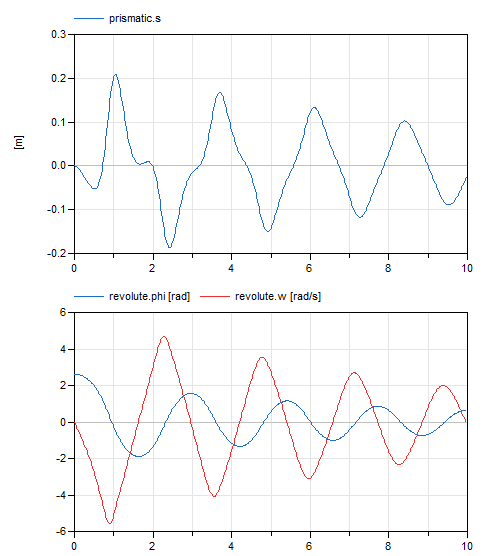
Selected continuous time states
- prismatic.s
- prismatic.v
- revolute.phi
- revolute.w
Components (8)
| body |
Type: Body Description: Body component with mass and inertia |
|
|---|---|---|
| fixedTranslation |
Type: FixedTranslation Description: A fixed translation between two components (rigid rod) |
|
| fixed |
Type: Fixed Description: Frame fixed in the planar world frame at a given position and orientation |
|
| body1 |
Type: Body Description: Body component with mass and inertia |
|
| planarWorld |
Type: PlanarWorld Description: Planar world coordinate system + gravity field + default animation definition |
|
| revolute |
Type: Revolute Description: A revolute joint |
|
| prismatic |
Type: Prismatic Description: A prismatic joint |
|
| damper1D |
Type: Damper Description: Linear 1D translational damper |
Revisions
 Developed 2010 at the DLR Institute of System Dynamics and Control
Developed 2010 at the DLR Institute of System Dynamics and Control