WOLFRAM SYSTEM MODELER
EarthModels the mass of the earth |
|
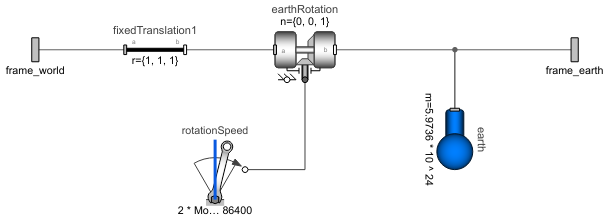
Diagram
Wolfram Language
In[1]:=
SystemModel["IndustryExamples.AerospaceDefense.Satellite.Components.Earth"]
Out[1]:=

Information
This component models the Earth, rotating around a fixed frame.
Connectors (2)
Components (4)
| rotationSpeed |
Type: ConstantSpeed Description: Constant speed, not dependent on torque |
|
|---|---|---|
| earthRotation |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| fixedTranslation1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| earth |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
Used in Examples (1)
|
IndustryExamples.AerospaceDefense.Satellite Model scenario of the launch and flight of a satellite. |