WOLFRAM SYSTEMMODELER
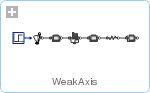
WeakAxisModel of a weak axis |
|
Diagram

Wolfram Language
In[1]:=

SystemModel["IntroductoryExamples.MultiDomain.WeakAxis"]
Out[1]:=
Information
This is the same model as the stiff axis model but with added weakness. Note that the moment of inertia is set to 0.5 for inertia2 and inertia3 and the spring constant is set to 5.
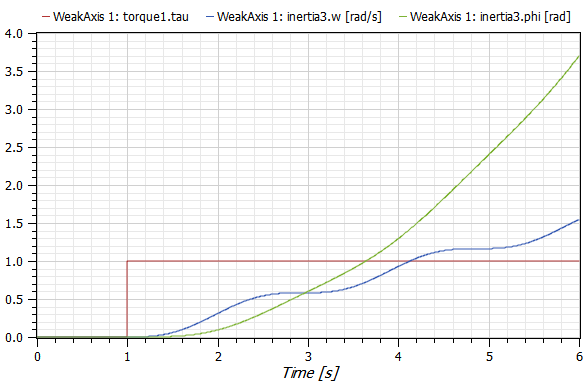
A 6 second simulation shows that we have a similar behavior as for the stiff model but with a deflection added:
Note that inertia3 is the last element of the weak axis, while inertia2 is the last element of the stiff axis.
For a step by step tutorial see Multidomain—A Servo Mechanism.