WOLFRAM SYSTEM MODELER
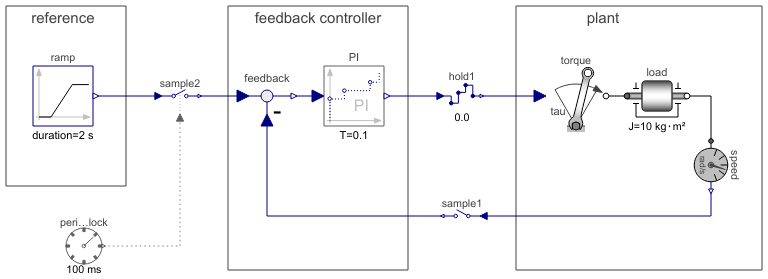
ExactlyClockedWithDiscreteControllerSimple controlled drive with discrete controller and exact periodic clocks (period is used in the controller) |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Clocked.Examples.SimpleControlledDrive.ExactlyClockedWithDiscreteController"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This is the same model as ClockedWithDiscreteController. The only difference is that the clock is defined with an exact periodic clock and not with a Real periodic clock.
Components (10)
| load |
Type: Inertia Description: 1D-rotational component with inertia |
|
|---|---|---|
| speed |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| ramp |
Type: Ramp Description: Generate ramp signal |
|
| feedback |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| torque |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| sample2 |
Type: SampleClocked Description: Sample the continuous-time, Real input signal and provide it as clocked output signal. The clock is provided as input signal |
|
| hold1 |
Type: Hold Description: Hold the clocked, Real input signal and provide it as continuous-time output signal (zero order hold) |
|
| sample1 |
Type: Sample Description: Sample the continuous-time, Real input signal and provide it as clocked output signal (clock is inferred) |
|
| PI |
Type: PI Description: Discrete-time PI controller with clocked input and output signals (for periodic and aperiodic systems using the parameterization of the continuous PI controller) |
|
| periodicClock |
Type: PeriodicExactClock Description: Generate a periodic clock signal with a period defined by an Integer number with resolution |