WOLFRAM SYSTEM MODELER
CurrentControlledDCPMCurrent controlled DC PM drive with H-bridge from battery |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Electrical.Machines.Examples.ControlledDCDrives.CurrentControlledDCPM"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
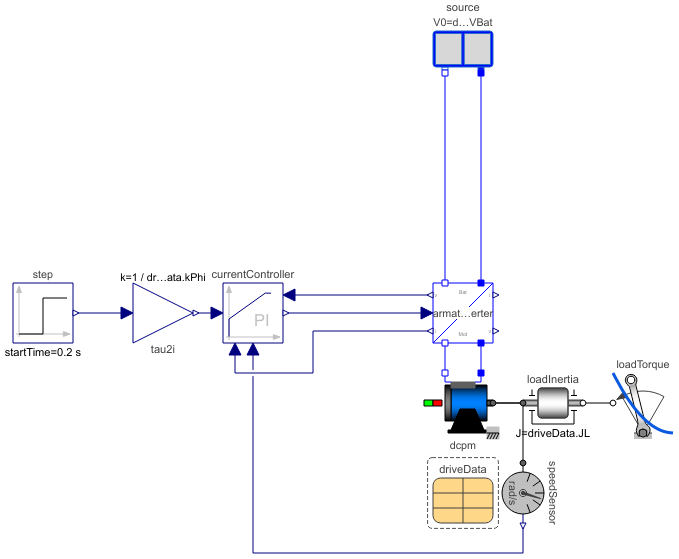
This model demonstrates how a current controller for a DC PM drive works.
The current controller is parameterized according to the absolute optimum.
At time=0.2 s a reference torque step is applied, causing the drive to accelerate until motor torque and load torque are at an equilibrium.
Further reading: Tutorial at the Modelica Conference 2017
Parameters (1)
| driveData |
Replaceable Component Type: DriveDataDCPM Description: DC machine data |
|---|
Components (12)
| driveData |
Type: DriveDataDCPM Description: DC machine data |
|
|---|---|---|
| loadInertia |
Type: Inertia Description: 1D-rotational component with inertia |
|
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
| dcpm |
Type: DC_PermanentMagnet Description: Permanent magnet DC machine |
|
| armatureInverter |
Type: DcdcInverter Description: DC-DC inverter |
|
| currentController |
Type: LimitedPI Description: Limited PI controller with anti-windup and feed-forward |
|
| tau2i |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| constantVoltage |
Type: ConstantVoltage Description: Source for constant voltage |
|
| resistor |
Type: Resistor Description: Ideal linear electrical resistor |
|
| ground |
Type: Ground Description: Ground node |
|
| loadTorque |
Type: QuadraticSpeedDependentTorque Description: Quadratic dependency of torque versus speed |
|
| step |
Type: Step Description: Generate step signal of type Real |