WOLFRAM SYSTEM MODELER
SMPM_ResistiveBrakingPermanentMagnetSynchronousMachine braking with a resistor |
|
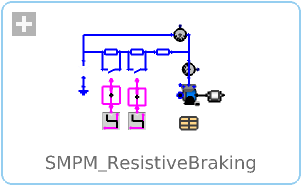
Diagram

Wolfram Language
In[1]:=
SystemModel["Modelica.Electrical.Machines.Examples.SynchronousMachines.SMPM_ResistiveBraking"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
The voltages induced by the permanent magnets of the synchronous machine is shortened over the inductance and resistance of the stator winding and the (optional) external braking resistors. The currents driven by these voltages cause a braking torque.
The external braking resistor is implemented with three stages which get shortened at different points during braking. Note that the first (smallest) stage is not shortened, which ensures a minimum damping to avoid oscillations of angular velocity around zero. The total braking resistance (sum of all stages) has to be adapted to the angular velocity at which braking starts.
Plot tauElectrical and tauShaft versus wMechanical.
Default machine parameters are used.
Parameters (5)
| JLoad |
Value: 4 * smpmData.Jr Type: Inertia (kg⋅m²) Description: Load's moment of inertia |
|---|---|
| w0 |
Value: 2 * pi * smpmData.fsNominal / smpmData.p Type: AngularVelocity (rad/s) Description: Initial speed |
| k |
Value: {1, 3, 5} Type: Real[3] Description: Braking resistance stages w.r.t. Rs |
| idq_sr |
Type: Current[2] (A) Description: Initial stator current space phasor |
| smpmData |
Type: SM_PermanentMagnetData Description: Common parameters for synchronous machines with permanent magnet |
Components (17)
| smpmData |
Type: SM_PermanentMagnetData Description: Common parameters for synchronous machines with permanent magnet |
|
|---|---|---|
| smpm |
Type: SM_PermanentMagnet Description: Permanent magnet synchronous machine |
|
| inertiaLoad |
Type: Inertia Description: 1D-rotational component with inertia |
|
| terminalBox |
Type: TerminalBox Description: Terminal box Y/D-connection |
|
| currentQuasiRMSSensor |
Type: CurrentQuasiRMSSensor Description: Continuous quasi current RMS sensor for polyphase system |
|
| star |
Type: Star Description: Star-connection |
|
| ground |
Type: Ground Description: Ground node |
|
| voltageRMSSensor |
Type: VoltageQuasiRMSSensor Description: Continuous quasi voltage RMS sensor for polyphase system |
|
| resistor1 |
Type: Resistor Description: Ideal linear electrical resistors |
|
| resistor2 |
Type: Resistor Description: Ideal linear electrical resistors |
|
| resistor3 |
Type: Resistor Description: Ideal linear electrical resistors |
|
| switch2 |
Type: IdealClosingSwitch Description: Polyphase ideal closer |
|
| switch3 |
Type: IdealClosingSwitch Description: Polyphase ideal closer |
|
| booleanReplicator2 |
Type: BooleanReplicator Description: Boolean signal replicator |
|
| booleanReplicator3 |
Type: BooleanReplicator Description: Boolean signal replicator |
|
| booleanStep2 |
Type: BooleanStep Description: Generate step signal of type Boolean |
|
| booleanStep3 |
Type: BooleanStep Description: Generate step signal of type Boolean |