WOLFRAM SYSTEM MODELER
SM_PermanentMagnetPermanent magnet synchronous machine |
|
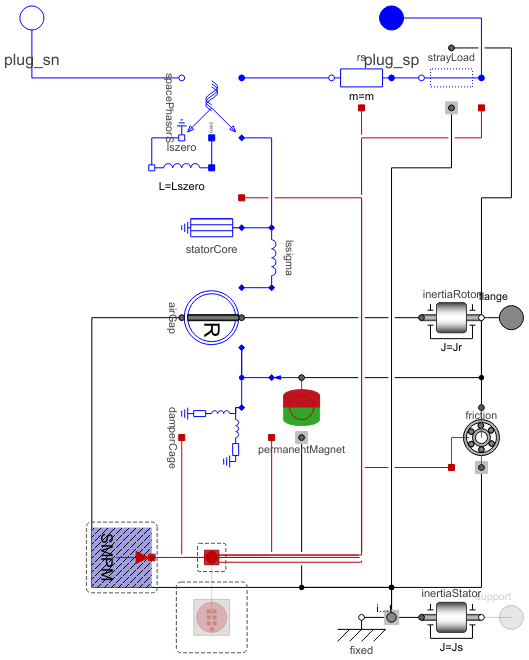
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Electrical.Machines.BasicMachines.SynchronousMachines.SM_PermanentMagnet"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Model of a three-phase permanent magnet synchronous machine.
Resistance and stray inductance of stator is modeled directly in stator phases, then using space phasor transformation and a rotor-fixed AirGap model. Resistance and stray inductance of rotor's squirrel cage is modeled in two axis of the rotor-fixed coordinate system. Permanent magnet excitation is modelled by a constant equivalent excitation current feeding the d-axis. The machine models take the following loss effects into account:
- heat losses in the temperature dependent stator winding resistances
- optional, when enabled: heat losses in the temperature dependent damper cage resistances
- friction losses
- core losses (only eddy current losses, no hysteresis losses)
- stray load losses
- permanent magnet losses
Whether a damper cage is present or not, can be selected with Boolean parameter useDamperCage (default = true).
Default values for machine's parameters (a realistic example) are:
| number of pole pairs p | 2 | |
| stator's moment of inertia | 0.29 | kg.m2 |
| rotor's moment of inertia | 0.29 | kg.m2 |
| nominal frequency fNominal | 50 | Hz |
| nominal voltage per phase | 100 | V RMS |
| no-load voltage per phase | 112.3 | V RMS @ nominal speed |
| nominal current per phase | 100 | A RMS |
| nominal torque | 181.4 | Nm |
| nominal speed | 1500 | rpm |
| nominal mechanical output | 28.5 | kW |
| nominal rotor angle | 20.75 | degree |
| efficiency | 95.0 | % |
| power factor | 0.98 | |
| stator resistance | 0.03 | Ohm per phase at reference temperature |
| reference temperature TsRef | 20 | °C |
| temperature coefficient alpha20s | 0 | 1/K |
| stator reactance Xd | 0.4 | Ohm per phase in d-axis |
| stator reactance Xq | 0.4 | Ohm per phase in q-axis |
| stator stray reactance Xss | 0.1 | Ohm per phase |
| damper resistance in d-axis | 0.04 | Ohm at reference temperature |
| damper resistance in q-axis | same as d-axis | |
| reference temperature TrRef | 20 | °C |
| temperature coefficient alpha20r | 0 | 1/K |
| damper stray reactance in d-axis XDds | 0.05 | Ohm |
| damper stray reactance in q-axis XDqs | same as d-axis | |
| stator operational temperature TsOperational | 20 | °C |
| damper operational temperature TrOperational | 20 | °C |
| These values give the following inductances: | ||
| main field inductance in d-axis | (Xd - Xss)/(2*pi*fNominal) | |
| main field inductance in q-axis | (Xq - Xss)/(2*pi*fNominal) | |
| stator stray inductance per phase | Xss/(2*pi*fNominal) | |
| damper stray inductance in d-axis | XDds/(2*pi*fNominal) | |
| damper stray inductance in q-axis | XDqs/(2*pi*fNominal) |
Parameters (32)
| m |
Value: 3 Type: Integer Description: Number of phases |
|---|---|
| p |
Type: Integer Description: Number of pole pairs (Integer) |
| fsNominal |
Type: Frequency (Hz) Description: Nominal frequency |
| TsOperational |
Type: Temperature (K) Description: Operational temperature of stator resistance |
| Rs |
Type: Resistance (Ω) Description: Stator resistance per phase at TRef |
| TsRef |
Type: Temperature (K) Description: Reference temperature of stator resistance |
| alpha20s |
Type: LinearTemperatureCoefficient20 (1/K) Description: Temperature coefficient of stator resistance at 20 degC |
| Lszero |
Value: Lssigma Type: Inductance (H) Description: Stator zero sequence inductance |
| Lssigma |
Type: Inductance (H) Description: Stator stray inductance per phase |
| Jr |
Type: Inertia (kg⋅m²) Description: Rotor's moment of inertia |
| useSupport |
Value: false Type: Boolean Description: Enable / disable (=fixed stator) support |
| Js |
Value: Jr Type: Inertia (kg⋅m²) Description: Stator's moment of inertia |
| useThermalPort |
Value: false Type: Boolean Description: Enable / disable (=fixed temperatures) thermal port |
| frictionParameters |
Type: FrictionParameters Description: Friction loss parameter record |
| statorCoreParameters |
Type: CoreParameters Description: Stator core loss parameter record; all parameters refer to stator side |
| strayLoadParameters |
Type: StrayLoadParameters Description: Stray load loss parameter record |
| powerBalance |
Replaceable Component Type: PowerBalanceSMPM Description: Power balance |
| thermalPort |
Replaceable Component Type: ThermalPortSMPM Description: Thermal port of synchronous machine with permanent magnets |
| thermalAmbient |
Replaceable Component Type: ThermalAmbientSMPM Description: Thermal ambient for synchronous machine with permanent magnets |
| TpmOperational |
Value: 293.15 Type: Temperature (K) Description: Operational temperature of permanent magnet |
| TrOperational |
Type: Temperature (K) Description: Operational temperature of (optional) damper cage |
| VsOpenCircuit |
Type: Voltage (V) Description: Open circuit RMS voltage per phase @ fsNominal |
| Lmd |
Type: Inductance (H) Description: Stator main field inductance per phase in d-axis |
| Lmq |
Type: Inductance (H) Description: Stator main field inductance per phase in q-axis |
| useDamperCage |
Type: Boolean Description: Enable / disable damper cage |
| Lrsigmad |
Type: Inductance (H) Description: Damper stray inductance in d-axis |
| Lrsigmaq |
Value: Lrsigmad Type: Inductance (H) Description: Damper stray inductance in q-axis |
| Rrd |
Type: Resistance (Ω) Description: Damper resistance in d-axis at TRef |
| Rrq |
Value: Rrd Type: Resistance (Ω) Description: Damper resistance in q-axis at TRef |
| TrRef |
Type: Temperature (K) Description: Reference temperature of damper resistances in d- and q-axis |
| alpha20r |
Type: LinearTemperatureCoefficient20 (1/K) Description: Temperature coefficient of damper resistances in d- and q-axis |
| permanentMagnetLossParameters |
Type: PermanentMagnetLossParameters Description: Permanent magnet loss parameter record |
Inputs (4)
| idq_ss |
Default Value: airGap.i_ss Type: Current[2] (A) Description: Stator space phasor current / stator fixed frame |
|---|---|
| idq_sr |
Default Value: airGap.i_sr Type: Current[2] (A) Description: Stator space phasor current / rotor fixed frame |
| idq_rs |
Default Value: airGap.i_rs Type: Current[2] (A) Description: Rotor space phasor current / stator fixed frame |
| idq_rr |
Default Value: airGap.i_rr Type: Current[2] (A) Description: Rotor space phasor current / rotor fixed frame |
Outputs (8)
| phiMechanical |
Default Value: flange.phi - internalSupport.phi Type: Angle (rad) Description: Mechanical angle of rotor against stator |
|---|---|
| wMechanical |
Default Value: der(phiMechanical) Type: AngularVelocity (rad/s) Description: Mechanical angular velocity of rotor against stator |
| tauElectrical |
Default Value: inertiaRotor.flange_a.tau Type: Torque (N⋅m) Description: Electromagnetic torque |
| tauShaft |
Default Value: -flange.tau Type: Torque (N⋅m) Description: Shaft torque |
| powerBalance |
Type: PowerBalanceSMPM Description: Power balance |
| vs |
Default Value: plug_sp.pin.v - plug_sn.pin.v Type: Voltage[m] (V) Description: Stator instantaneous voltages |
| is |
Default Value: plug_sp.pin.i Type: Current[m] (A) Description: Stator instantaneous currents |
| i_0_s |
Default Value: spacePhasorS.zero.i Type: Current (A) Description: Stator zero-sequence current |
Connectors (7)
| flange |
Type: Flange_a Description: Shaft |
|
|---|---|---|
| support |
Type: Flange_a Description: Support at which the reaction torque is acting |
|
| plug_sp |
Type: PositivePlug Description: Positive stator plug |
|
| plug_sn |
Type: NegativePlug Description: Negative stator plug |
|
| thermalPort |
Type: ThermalPortSMPM Description: Thermal port of synchronous machine with permanent magnets |
|
| ir |
Type: RealOutput[2] Description: Damper cage currents |
|
| idq_dr |
Type: RealOutput[2] Description: Damper space phasor current / rotor fixed frame |
Components (19)
| frictionParameters |
Type: FrictionParameters Description: Friction loss parameter record |
|
|---|---|---|
| inertiaRotor |
Type: Inertia Description: 1D-rotational component with inertia |
|
| inertiaStator |
Type: Inertia Description: 1D-rotational component with inertia |
|
| fixed |
Type: Fixed Description: Flange fixed in housing at a given angle |
|
| friction |
Type: Friction Description: Model of angular velocity dependent friction losses |
|
| statorCoreParameters |
Type: CoreParameters Description: Stator core loss parameter record; all parameters refer to stator side |
|
| strayLoadParameters |
Type: StrayLoadParameters Description: Stray load loss parameter record |
|
| powerBalance |
Type: PowerBalanceSMPM Description: Power balance |
|
| rs |
Type: Resistor Description: Ideal linear electrical resistors |
|
| lssigma |
Type: Inductor Description: Space phasor inductor |
|
| lszero |
Type: Inductor Description: Ideal linear electrical inductor |
|
| statorCore |
Type: Core Description: Model of core losses |
|
| spacePhasorS |
Type: SpacePhasor Description: Physical transformation: three-phase <-> space phasors |
|
| strayLoad |
Type: StrayLoad Description: Model of stray load losses dependent on current and speed |
|
| thermalAmbient |
Type: ThermalAmbientSMPM Description: Thermal ambient for synchronous machine with permanent magnets |
|
| airGap |
Type: AirGapR Description: Airgap in rotor-fixed coordinate system |
|
| permanentMagnetLossParameters |
Type: PermanentMagnetLossParameters Description: Permanent magnet loss parameter record |
|
| permanentMagnet |
Type: PermanentMagnetWithLosses Description: Permanent magnet excitation |
|
| damperCage |
Type: DamperCage Description: Squirrel Cage |
Used in Examples (6)
|
Modelica.Electrical.Machines.Examples.SynchronousMachines Test example: PermanentMagnetSynchronousMachine with inverter |
|
|
Modelica.Electrical.Machines.Examples.SynchronousMachines Test example: PermanentMagnetSynchronousMachine fed by current source |
|
|
Modelica.Electrical.Machines.Examples.SynchronousMachines Test example: PermanentMagnetSynchronousMachine fed by FOC |
|
|
Modelica.Electrical.Machines.Examples.SynchronousMachines Test example: PermanentMagnetSynchronousMachine acting as brake |
|
|
Modelica.Electrical.Machines.Examples.SynchronousMachines PermanentMagnetSynchronousMachine braking with a resistor |
|
|
Modelica.Magnetic.FundamentalWave.Examples.BasicMachines.SynchronousMachines Starting of permanent magnet synchronous machine with inverter |
Used in Components (1)
|
Modelica.Blocks.Examples.Noise.Utilities.Parts Synchronous machine with current controller and measurement noise |