WOLFRAM SYSTEM MODELER
CurrentControllerCurrent controller |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Electrical.Machines.Utilities.CurrentController"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
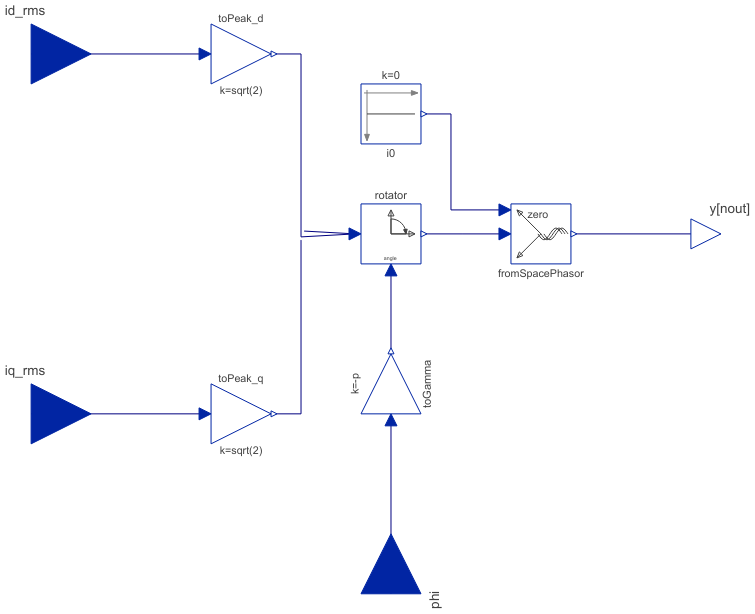
Simple Current-Controller.
The desired rms values of d- and q-component of the space phasor current in rotor fixed coordinate system are given by inputs "id_rms" and "iq_rms". Using the given rotor position (input "phi"), the correct three-phase currents (output "y[3]") are calculated. They can be used to feed a current source which in turn feeds an induction machine.
Parameters (2)
| nout |
Value: m Type: Integer Description: Number of outputs |
|---|---|
| p |
Value: Type: Integer Description: Number of pole pairs |
Connectors (4)
| y |
Type: RealOutput[nout] Description: Connector of Real output signals |
|
|---|---|---|
| id_rms |
Type: RealInput |
|
| iq_rms |
Type: RealInput |
|
| phi |
Type: RealInput |
Components (6)
Used in Examples (4)
|
Modelica.Electrical.Machines.Examples.SynchronousInductionMachines Test example: PermanentMagnetSynchronousInductionMachine fed by current source |
|
|
Modelica.Magnetic.FundamentalWave.Examples.BasicMachines Test example: PermanentMagnetSynchronousInductionMachine fed by current source |
|
|
Modelica.Magnetic.QuasiStatic.FundamentalWave.Examples.BasicMachines.SynchronousMachines Test example: PermanentMagnetSynchronousMachine fed by current source |
|
|
Modelica.Magnetic.QuasiStatic.FundamentalWave.Examples.BasicMachines.SynchronousMachines Test example: Synchronous reluctance machine fed by current source |
Used in Components (1)
|
Modelica.Blocks.Examples.NoiseExamples.Utilities.Parts Synchronous induction machine with current controller and measurement noise |