WOLFRAM SYSTEM MODELER
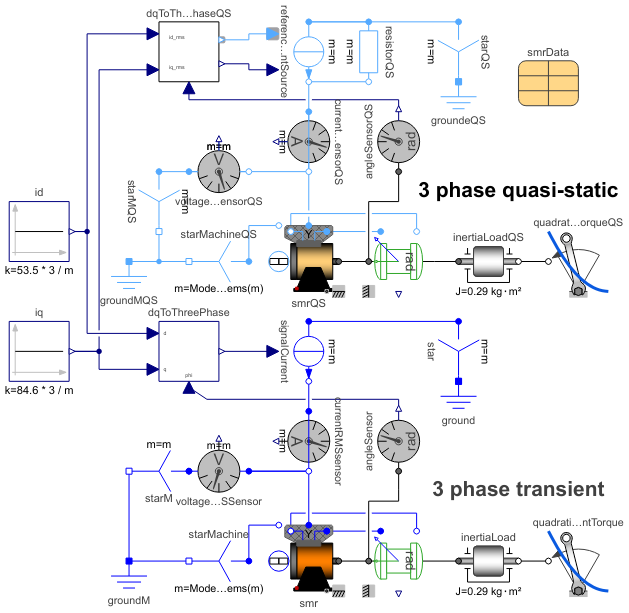
SMR_CurrentSourceTest example: Synchronous reluctance machine fed by current source |
|
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Magnetic.QuasiStatic.FundamentalWave.Examples.BasicMachines.SynchronousMachines.SMR_CurrentSource"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This example compares a time transient and a quasi-static model of a synchronous reluctance machine. The machines are fed by a current source. The current components are oriented at the magnetic field orientation and transformed to the stator fixed reference frame. This way the machines are operated at constant torque. The machines start to accelerate from standstill.
Simulate for 2 seconds and plot (versus time):
smpm|smpmQS.wMechanical: machine speedsmpm|smpmQS.tauElectrical: machine torque
Parameters (9)
| m |
Value: 3 Type: Integer Description: Number of phases |
|---|---|
| VNominal |
Value: 100 Type: Voltage (V) Description: Nominal RMS voltage per phase |
| fNominal |
Value: smrData.fsNominal Type: Frequency (Hz) Description: Nominal frequency |
| f |
Value: 50 Type: Frequency (Hz) Description: Actual frequency |
| tRamp |
Value: 1 Type: Time (s) Description: Frequency ramp |
| TLoad |
Value: 181.4 Type: Torque (N⋅m) Description: Nominal load torque |
| tStep |
Value: 1.2 Type: Time (s) Description: Time of load torque step |
| JLoad |
Value: 0.29 Type: Inertia (kg⋅m²) Description: Load's moment of inertia |
| smrData |
Type: SM_ReluctanceRotorData Description: Synchronous machine data |
Components (34)
| signalCurrent |
Type: SignalCurrent Description: Polyphase signal current source |
|
|---|---|---|
| star |
Type: Star Description: Star-connection |
|
| ground |
Type: Ground Description: Ground node |
|
| dqToThreePhase |
Type: DQToThreePhase Description: Transforms dq to three-phase |
|
| iq |
Type: Constant Description: Generate constant signal of type Real |
|
| id |
Type: Constant Description: Generate constant signal of type Real |
|
| voltageQuasiRMSSensor |
Type: VoltageQuasiRMSSensor Description: Continuous quasi voltage RMS sensor for polyphase system |
|
| starM |
Type: Star Description: Star-connection |
|
| groundM |
Type: Ground Description: Ground node |
|
| terminalBox |
Type: MultiTerminalBox Description: Terminal box Y/D-connection |
|
| rotorDisplacementAngle |
Type: RotorDisplacementAngle Description: Rotor lagging angle |
|
| angleSensor |
Type: AngleSensor Description: Ideal sensor to measure the absolute angle of flange |
|
| inertiaLoad |
Type: Inertia Description: 1D-rotational component with inertia |
|
| quadraticSpeedDependentTorque |
Type: QuadraticSpeedDependentTorque Description: Quadratic dependency of torque versus speed |
|
| currentRMSsensor |
Type: CurrentQuasiRMSSensor Description: Continuous quasi current RMS sensor for polyphase system |
|
| inertiaLoadQS |
Type: Inertia Description: 1D-rotational component with inertia |
|
| quadraticSpeedDependentTorqueQS |
Type: QuadraticSpeedDependentTorque Description: Quadratic dependency of torque versus speed |
|
| starMachineQS |
Type: Star Description: Star connection |
|
| groundMQS |
Type: Ground Description: Electrical ground |
|
| terminalBoxQS |
Type: MultiTerminalBox Description: Terminal box Y/D-connection |
|
| dqToThreePhaseQS |
Type: CurrentController Description: Current controller |
|
| angleSensorQS |
Type: AngleSensor Description: Ideal sensor to measure the absolute angle of flange |
|
| referenceCurrentSource |
Type: ReferenceCurrentSource Description: Variable polyphase AC current with reference angle input |
|
| starQS |
Type: Star Description: Star connection |
|
| groundeQS |
Type: Ground Description: Electrical ground |
|
| resistorQS |
Type: Resistor Description: Polyphase linear resistor |
|
| smrData |
Type: SM_ReluctanceRotorData Description: Synchronous machine data |
|
| smrQS |
Type: SM_ReluctanceRotor Description: Synchronous reluctance machine with optional damper cage |
|
| smr |
Type: SM_ReluctanceRotor Description: Reluctance machine with optional damper cage |
|
| rotorAngleQS |
Type: RotorDisplacementAngle Description: Rotor lagging angle |
|
| currentRMSSensorQS |
Type: CurrentQuasiRMSSensor Description: Continuous quasi current RMS sensor for polyphase system |
|
| voltageQuasiRMSSensorQS |
Type: VoltageQuasiRMSSensor Description: Continuous quasi voltage RMS sensor for polyphase system |
|
| starMQS |
Type: Star Description: Star connection |
|
| starMachine |
Type: Star Description: Star-connection |