WOLFRAM SYSTEM MODELER
RotorDisplacementAngleRotor lagging angle |
|
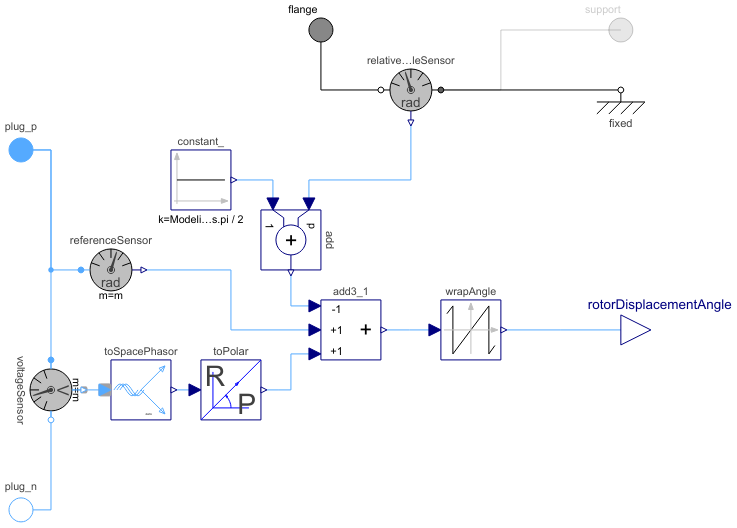
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Magnetic.QuasiStatic.FundamentalWave.Sensors.RotorDisplacementAngle"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Calculates rotor lagging angle by measuring the stator phase voltages, transforming them to the corresponding space phasor in stator-fixed coordinate system, rotating the space phasor to the rotor-fixed coordinate system and calculating the angle of this space phasor.
The sensor's housing can be implicitly fixed (useSupport=false).
If the machine's stator also implicitly fixed (useSupport=false), the angle at the flange
is equal to the angle of the machine's rotor against the stator.
Otherwise, the sensor's support has to be connected to the machine's support.
Parameters (4)
| m |
Value: 3 Type: Integer Description: Number of phases |
|---|---|
| p |
Type: Integer Description: Number of pole pairs |
| positiveRange |
Value: false Type: Boolean Description: Use only positive output range, if true |
| useSupport |
Value: false Type: Boolean Description: Use support or fixed housing |
Connectors (5)
| rotorDisplacementAngle |
Type: RealOutput Description: 'output Real' as connector |
|
|---|---|---|
| plug_p |
Type: PositivePlug Description: Positive quasi-static polyphase plug |
|
| plug_n |
Type: NegativePlug Description: Negative quasi-static polyphase plug |
|
| flange |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
| support |
Type: Flange_a Description: Support at which the reaction torque is acting |
Components (10)
| relativeAngleSensor |
Type: RelAngleSensor Description: Ideal sensor to measure the relative angle between two flanges |
|
|---|---|---|
| constant_ |
Type: Constant Description: Generate constant signal of type Real |
|
| add |
Type: Add Description: Output the sum of the two inputs |
|
| fixed |
Type: Fixed Description: Flange fixed in housing at a given angle |
|
| referenceSensor |
Type: ReferenceSensor Description: Sensor of reference angle gamma |
|
| voltageSensor |
Type: VoltageSensor Description: Voltage sensor |
|
| add3_1 |
Type: Add3 Description: Output the sum of the three inputs |
|
| toSpacePhasor |
Type: ToSpacePhasor Description: Conversion: m phase -> space phasor |
|
| toPolar |
Type: ToPolar Description: Converts a space phasor to polar coordinates |
|
| wrapAngle |
Type: WrapAngle Description: Wrap angle to interval ]-pi,pi] or [0,2*pi[ |
Used in Examples (4)
|
Modelica.Magnetic.QuasiStatic.FundamentalWave.Examples.BasicMachines.SynchronousMachines Test example: PermanentMagnetSynchronousMachine fed by current source |
|
|
Modelica.Magnetic.QuasiStatic.FundamentalWave.Examples.BasicMachines.SynchronousMachines Test example: PermanentMagnetSynchronousMachine, investigating maximum torque per Amps |
|
|
Modelica.Magnetic.QuasiStatic.FundamentalWave.Examples.BasicMachines.SynchronousMachines Electrical excited synchronous machine operating as generator |
|
|
Modelica.Magnetic.QuasiStatic.FundamentalWave.Examples.BasicMachines.SynchronousMachines Test example: Synchronous reluctance machine fed by current source |