WOLFRAM SYSTEM MODELER
IMC_ConveyorInduction machine with squirrel cage and inverter driving a conveyor |
|
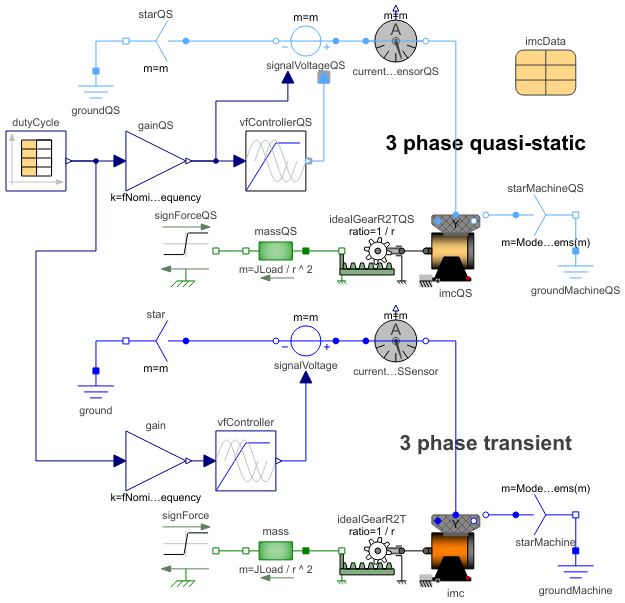
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Magnetic.QuasiStatic.FundamentalWave.Examples.BasicMachines.InductionMachines.IMC_Conveyor"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
An ideal frequency inverter is modeled by using a VfController and a three-phase SignalVoltage. Frequency is driven by a load cycle of acceleration, constant speed, deceleration and standstill. The mechanical load is a constant torque like a conveyor (with regularization around zero speed).
Simulate for 20 seconds and plot (versus time):
currentQuasiRMSSensor|currentQuasiRMSSensorQS.I: (equivalent) stator current RMSimc|imcQS.wMechanical: machine speedimc|imcQS.tauElectrical: machine torque
Default machine parameters are used.
Parameters (8)
| m |
Value: 3 Type: Integer Description: Number of phases |
|---|---|
| VNominal |
Value: 100 Type: Voltage (V) Description: Nominal RMS voltage per phase |
| fNominal |
Value: imcData.fsNominal Type: Frequency (Hz) Description: Nominal frequency |
| wNominal |
Value: 2 * pi * fNominal / imcData.p Type: AngularVelocity (rad/s) Description: Nominal speed |
| TLoad |
Value: 161.4 Type: Torque (N⋅m) Description: Nominal load torque |
| JLoad |
Value: 0.29 Type: Inertia (kg⋅m²) Description: Load's moment of inertia |
| r |
Value: 0.05 Type: Length (m) Description: Transmission radius |
| imcData |
Type: IM_SquirrelCageData Description: Induction machine data |
Components (28)
| imcQS |
Type: IM_SquirrelCage Description: Induction machine with squirrel cage |
|
|---|---|---|
| currentQuasiRMSSensorQS |
Type: CurrentQuasiRMSSensor Description: Continuous quasi current RMS sensor for polyphase system |
|
| dutyCycle |
Type: CombiTimeTable Description: Table look-up with respect to time and various interpolation and extrapolation methods (data from matrix/file) |
|
| vfControllerQS |
Type: VfController Description: Voltage-Frequency controller |
|
| signalVoltageQS |
Type: VariableVoltageSource Description: Variable polyphase AC voltage |
|
| starQS |
Type: Star Description: Star connection |
|
| groundQS |
Type: Ground Description: Electrical ground |
|
| terminalBoxQS |
Type: MultiTerminalBox Description: Terminal box Y/D-connection |
|
| imcData |
Type: IM_SquirrelCageData Description: Induction machine data |
|
| gainQS |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| idealGearR2TQS |
Type: IdealGearR2T Description: Gearbox transforming rotational into translational motion |
|
| massQS |
Type: Mass Description: Sliding mass with inertia |
|
| signForceQS |
Type: SignForce Description: Constant force changing sign with speed |
|
| groundMachineQS |
Type: Ground Description: Electrical ground |
|
| starMachineQS |
Type: Star Description: Star connection |
|
| imc |
Type: IM_SquirrelCage Description: Induction machine with squirrel cage |
|
| currentQuasiRMSSensor |
Type: CurrentQuasiRMSSensor Description: Continuous quasi current RMS sensor for polyphase system |
|
| vfController |
Type: VfController Description: Voltage-Frequency controller |
|
| signalVoltage |
Type: SignalVoltage Description: Polyphase signal voltage source |
|
| star |
Type: Star Description: Star-connection |
|
| ground |
Type: Ground Description: Ground node |
|
| terminalBox |
Type: MultiTerminalBox Description: Terminal box Y/D-connection |
|
| gain |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| idealGearR2T |
Type: IdealGearR2T Description: Gearbox transforming rotational into translational motion |
|
| mass |
Type: Mass Description: Sliding mass with inertia |
|
| signForce |
Type: SignForce Description: Constant force changing sign with speed |
|
| starMachine |
Type: Star Description: Star-connection |
|
| groundMachine |
Type: Ground Description: Ground node |