WOLFRAM SYSTEM MODELER
IMS_StartStarting of induction machine with slip rings |
|
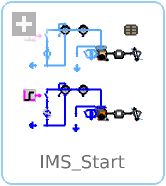
Diagram

Wolfram Language
In[1]:=

SystemModel["Modelica.Magnetic.QuasiStatic.FundamentalWave.Examples.BasicMachines.InductionMachines.IMS_Start"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This example compares a time transient and a quasi-static model of a polyphase induction machine.
At start time tOn a transient and a quasi-static polyphase voltage source are connected to induction machine with sliprings. The machine starts from standstill, accelerating inertias against load torque quadratic dependent on speed,
using a starting resistance. At time tRheostat external rotor resistance is shortened, finally reaching nominal speed.
Simulate for 1.5 seconds and plot (versus time):
currentRMSsensor.I|currentSensorQS.abs_i[1]: (equivalent) RMS stator currentims|imsQS.wMechanical: machine speedims|imsQS.tauElectrical: machine torque
Default machine parameters are used.
Parameters (11)
| m |
Value: 3 Type: Integer Description: Number of stator phases |
|---|---|
| mr |
Value: 3 Type: Integer Description: Number of rotor phases |
| VsNominal |
Value: 100 Type: Voltage (V) Description: Nominal RMS voltage per phase |
| fNominal |
Value: ims.fsNominal Type: Frequency (Hz) Description: Nominal frequency |
| tOn |
Value: 0.1 Type: Time (s) Description: Start time of machine |
| RStart |
Value: 0.16 / imsData.turnsRatio ^ 2 Type: Resistance (Ω) Description: Starting resistance |
| tRheostat |
Value: 1.0 Type: Time (s) Description: Time of shortening the rheostat |
| T_Load |
Value: 161.4 Type: Torque (N⋅m) Description: Nominal load torque |
| w_Load |
Value: Modelica.Units.Conversions.from_rpm(1440.45) Type: AngularVelocity (rad/s) Description: Nominal load speed |
| J_Load |
Value: 0.29 Type: Inertia (kg⋅m²) Description: Load inertia |
| imsData |
Type: IM_SlipRingData Description: Induction machine data |
Outputs (2)
Components (29)
| ground |
Type: Ground Description: Ground node |
|
|---|---|---|
| star |
Type: Star Description: Star-connection |
|
| sineVoltage |
Type: SineVoltage Description: Polyphase sine voltage source |
|
| idealCloser |
Type: IdealClosingSwitch Description: Polyphase ideal closer |
|
| booleanStep |
Type: BooleanStep[m] Description: Generate step signal of type Boolean |
|
| currentQuasiRMSSensor |
Type: CurrentQuasiRMSSensor Description: Continuous quasi current RMS sensor for polyphase system |
|
| terminalBoxM |
Type: MultiTerminalBox Description: Terminal box Y/D-connection |
|
| terminalBoxQS |
Type: MultiTerminalBox Description: Terminal box Y/D-connection |
|
| ims |
Type: IM_SlipRing Description: Induction machine with slip ring rotor |
|
| imsQS |
Type: IM_SlipRing Description: Induction machine with slip ring rotor |
|
| rheostatM |
Type: SwitchedRheostat Description: Rheostat which is shortened after a given time |
|
| rheostatQS |
Type: SwitchedRheostat Description: Rheostat which is shortened after a given time |
|
| loadInertia |
Type: Inertia Description: 1D-rotational component with inertia |
|
| loadInertiaQS |
Type: Inertia Description: 1D-rotational component with inertia |
|
| quadraticLoadTorque |
Type: QuadraticSpeedDependentTorque Description: Quadratic dependency of torque versus speed |
|
| quadraticLoadTorqueQS |
Type: QuadraticSpeedDependentTorque Description: Quadratic dependency of torque versus speed |
|
| imsData |
Type: IM_SlipRingData Description: Induction machine data |
|
| voltageSourceQS |
Type: VoltageSource Description: Constant polyphase AC voltage |
|
| starQS |
Type: Star Description: Star connection |
|
| groundQS |
Type: Ground Description: Electrical ground |
|
| powerSensorQS |
Type: PowerSensor Description: Power sensor |
|
| currentQuasiRMSSensorQS |
Type: CurrentQuasiRMSSensor Description: Continuous quasi current RMS sensor for polyphase system |
|
| idealCloserQS |
Type: IdealClosingSwitch Description: Polyphase ideal closer |
|
| booleanStepQS |
Type: BooleanStep[m] Description: Generate step signal of type Boolean |
|
| powerSensor |
Type: PowerSensor Description: Polyphase instantaneous power sensor |
|
| starMachineQS |
Type: Star Description: Star connection |
|
| groundMachineQS |
Type: Ground Description: Electrical ground |
|
| starMachine |
Type: Star Description: Star-connection |
|
| groundMachine |
Type: Ground Description: Ground node |