WOLFRAM SYSTEM MODELER
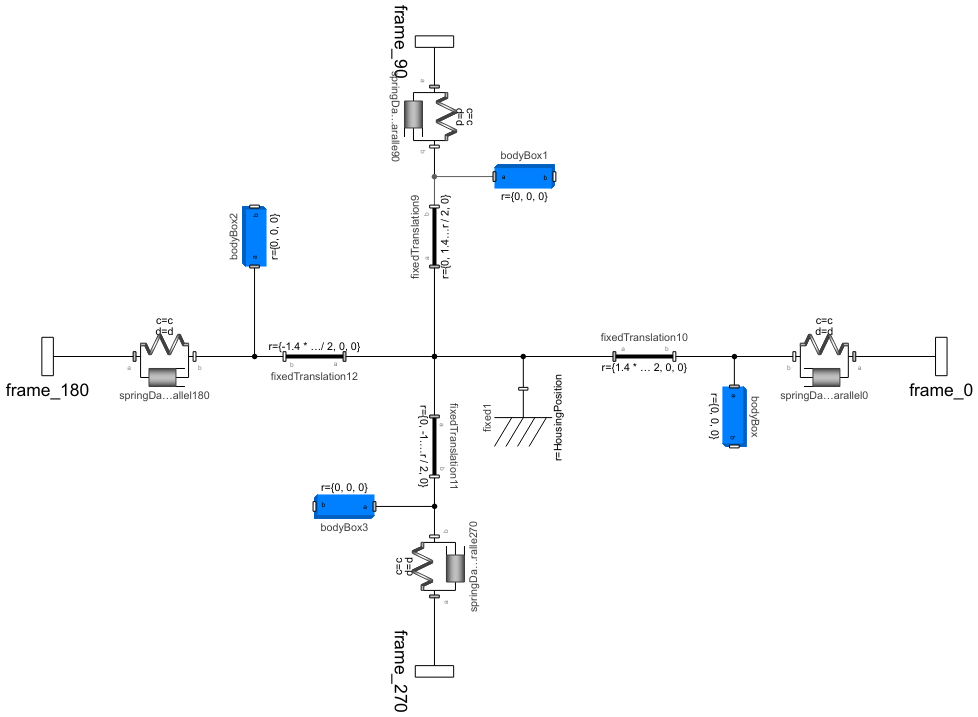
RingModel that has four spring dampers acting as a contact element in a ring shape |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.Supports.Ring"]
Out[1]:=

Information
Ring Support
This model is used in the Housing model. It acts as a ring wall that pushes back on anything that hits it. It will be as stiff or as flexible as you specify in the spring dampers.
References
[1] Schmid, S. R., B. J. Hamrock and Bo. O. Jacobson. Fundamentals of Machine Elements. CRC Press, 2013.
Parameters (5)
| HousingDiameter |
Type: Diameter (m) Description: Inner diameter of house where contact may occur |
|---|---|
| HousingPosition |
Value: {0, 0, 0} Type: Position[3] (m) Description: Center position for the house, resolved in world frame |
| c |
Type: TranslationalSpringConstant (N/m) Description: Spring constant |
| s_unstretched |
Value: 0 Type: Length (m) Description: Unstretched spring length |
| d |
Type: TranslationalDampingConstant (N⋅s/m) Description: Damping constant |
Connectors (4)
| frame_90 |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|
|---|---|---|
| frame_0 |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|
| frame_270 |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|
| frame_180 |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
Components (13)
| fixedTranslation9 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
|---|---|---|
| fixedTranslation10 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedTranslation11 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedTranslation12 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixed1 |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| bodyBox |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| bodyBox1 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| bodyBox2 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| bodyBox3 |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| springDamperParallel0 |
Type: SpringDamperParallel Description: Linear spring and linear damper in parallel |
|
| springDamperParalle90 |
Type: SpringDamperParallel Description: Linear spring and linear damper in parallel |
|
| springDamperParallel180 |
Type: SpringDamperParallel Description: Linear spring and linear damper in parallel |
|
| springDamperParalle270 |
Type: SpringDamperParallel Description: Linear spring and linear damper in parallel |
Used in Components (1)
|
RotatingMachinery.Supports Model of a flexible, damped housing with a stiff ring |