WOLFRAM SYSTEM MODELER
Scenario_55th Scenario |
|
Diagram
Wolfram Language
In[1]:=
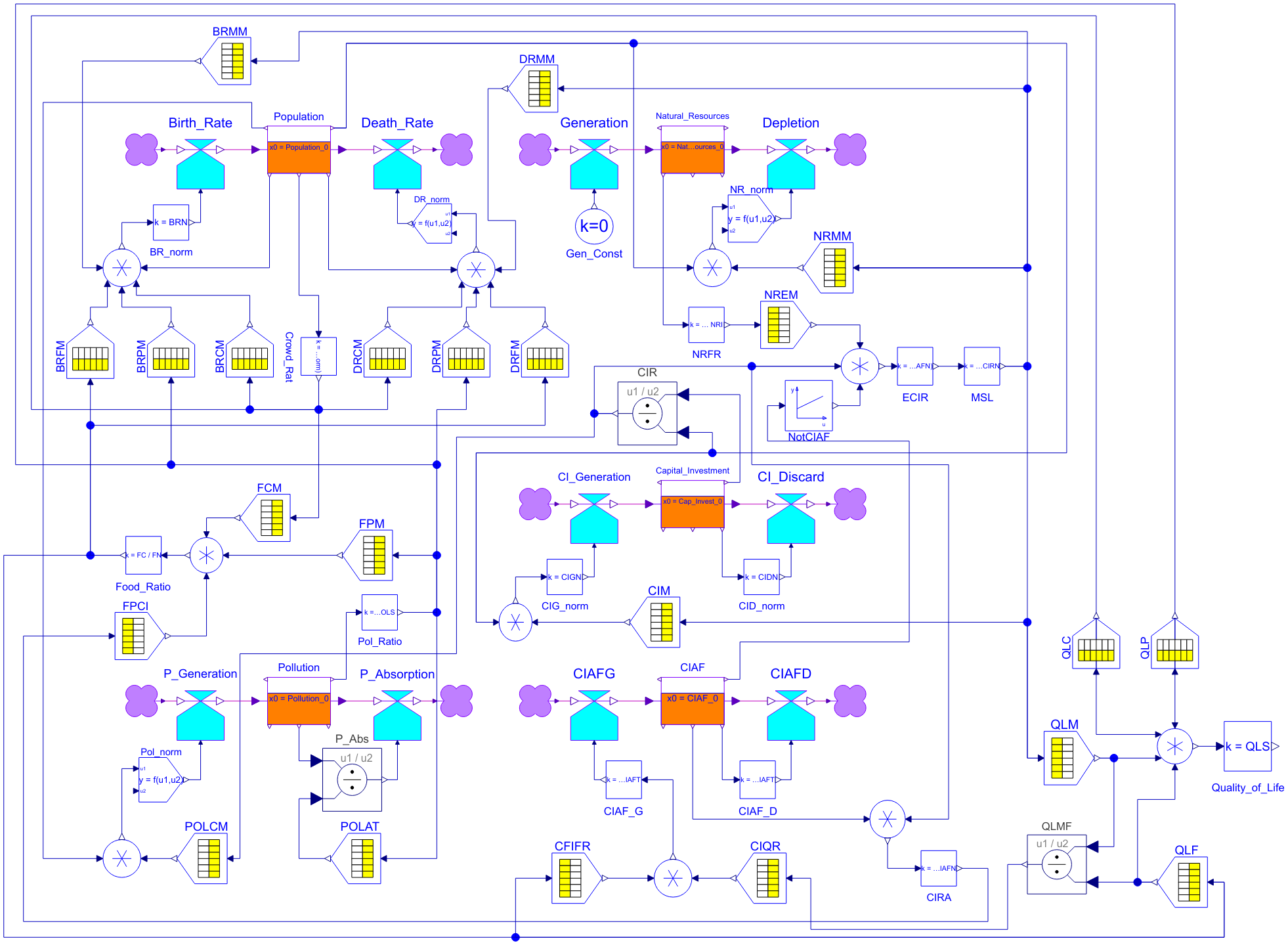
SystemModel["SystemDynamics.WorldDynamics.World2.Scenario_5"]
Out[1]:=
Information
This is yet another modification of Jay Forrester's WORLD2 model. We wish to introduce time reversal to the simulation. To this end, we replace the regular continuous levels of the System Dynamics methodology by reversible levels.
References:
- Cellier, F.E. (1991), Continuous System Modeling, Springer-Verlag, New York, ISBN: 0-387-97502-0, 755p.
- Forrester, J.W. (1971), World Dynamics, Pegasus Communications, 160p.
Simulate the model across 233 years with time reversal starting at year 200, i.e., we simulate the world model forward through time from the year 1900 until the year 2100, and then backward through time from the year 2100 until the year 2067. For this experiment, you need to set the simulation accuracy to 1e-10.
Plot the simulated world population against the calendar years.
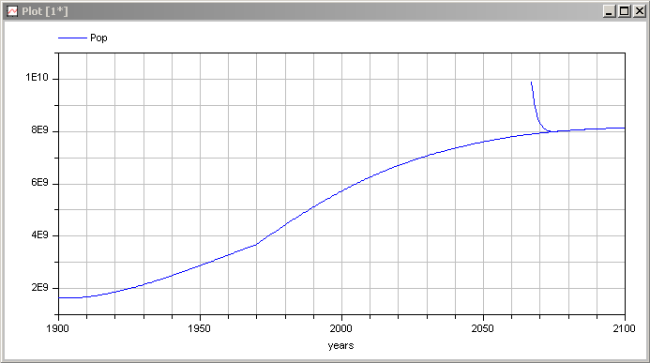
You shall notice that time reversal in the world model is numerically problematic. The simulation is numerically unstable in backward direction. The time-reversed model simulates correctly for a few years, but as numerical errors get the trajectory away from its designed path, the backward trajectory starts diverging quickly from the forward trajectory.
Parameters (18)
| Population_0 |
Value: 1650000000.0 Type: Real Description: World population in 1900 |
|---|---|
| Pollution_0 |
Value: 200000000.0 Type: Real Description: Pollution in 1900 |
| Nat_Resources_0 |
Value: 900000000000.0 Type: Real (ton) Description: Unrecoverable natural resources in 1900 |
| Cap_Invest_0 |
Value: 400000000.0 Type: Real (dollar) Description: Capital investment in 1900 |
| CIAF_0 |
Value: 0.2 Type: Real Description: Proportion of capital investment in agriculture in 1900 |
| BRN |
Value: 0.04 Type: Real (1/yr) Description: Normal birth rate |
| CIAFN |
Value: 0.3 Type: Real (dollar) Description: CIAF normalization |
| CIAFT |
Value: 15.0 Type: Real (yr) Description: CIAF time constant |
| CIDN |
Value: 0.025 Type: Real (dollar/yr) Description: Normal capital discard |
| CIGN |
Value: 0.05 Type: Real (dollar/yr) Description: Normal capital generation |
| ECIRN |
Value: 1.0 Type: Real (dollar) Description: Capital normalization |
| FC |
Value: 1.0 Type: Real (kg/yr) Description: Food coefficient |
| FN |
Value: 1.0 Type: Real (kg/yr) Description: Food normalization |
| Land_Area |
Value: 135000000.0 Type: Real (hectare) Description: Area of arable land |
| NRI |
Value: 900000000000.0 Type: Real (ton) Description: Initial natural resources |
| POLS |
Value: 3599900000.0 Type: Real Description: Standard pollution |
| Pop_dens_norm |
Value: 26.5 Type: Real (1/hectare) Description: Normal population density |
| QLS |
Value: 1.0 Type: Real Description: Standard quality of life |
Outputs (6)
| Pop |
Type: Real Description: World population |
|---|---|
| Pol |
Type: Real Description: Pollution |
| Pol_rat |
Type: Real Description: Pollution ratio |
| Cap_inv |
Type: Real (dollar) Description: Capital investment |
| Qual_life |
Type: Real Description: Quality of life |
| Nat_res |
Type: Real (ton) Description: Natural unrecoverable resources |
Components (78)
| Source1 |
Type: Source Description: This is the (dummy) source model of System Dynamics |
|
|---|---|---|
| Birth_Rate |
Type: Rate_1 Description: Unrestricted rate element with one influencing variable |
|
| Population |
Type: Reverse_Level Description: Level of the System Dynamics methodology with time reversal |
|
| Death_Rate |
Type: Rate_1 Description: Unrestricted rate element with one influencing variable |
|
| Sink1 |
Type: Sink Description: This is the (dummy) sink model of System Dynamics |
|
| Source2 |
Type: Source Description: This is the (dummy) source model of System Dynamics |
|
| Generation |
Type: Rate_1 Description: Unrestricted rate element with one influencing variable |
|
| Natural_Resources |
Type: Reverse_Level Description: Level of the System Dynamics methodology with time reversal |
|
| Depletion |
Type: Rate_1 Description: Unrestricted rate element with one influencing variable |
|
| Sink2 |
Type: Sink Description: This is the (dummy) sink model of System Dynamics |
|
| Gen_Const |
Type: Const Description: A constant factor |
|
| BRMM |
Type: Tabular Description: Tabular function |
|
| DRMM |
Type: Tabular Description: Tabular function |
|
| BR_norm |
Type: Gain Description: Gain factor |
|
| Prod_5_1 |
Type: Prod_5 Description: Product of five influencing factors |
|
| Prod_5_2 |
Type: Prod_5 Description: Product of five influencing factors |
|
| BRFM |
Type: Tabular Description: Tabular function |
|
| BRPM |
Type: Tabular Description: Tabular function |
|
| BRCM |
Type: Tabular Description: Tabular function |
|
| DRCM |
Type: Tabular Description: Tabular function |
|
| DRPM |
Type: Tabular Description: Tabular function |
|
| DRFM |
Type: Tabular Description: Tabular function |
|
| Crowd_Rat |
Type: Gain Description: Gain factor |
|
| Prod_2_1 |
Type: Prod_2 Description: Product of two influencing factors |
|
| NRMM |
Type: Tabular Description: Tabular function |
|
| Source3 |
Type: Source Description: This is the (dummy) source model of System Dynamics |
|
| CI_Generation |
Type: Rate_1 Description: Unrestricted rate element with one influencing variable |
|
| Capital_Investment |
Type: Reverse_Level Description: Level of the System Dynamics methodology with time reversal |
|
| CI_Discard |
Type: Rate_1 Description: Unrestricted rate element with one influencing variable |
|
| Sink3 |
Type: Sink Description: This is the (dummy) sink model of System Dynamics |
|
| CIG_norm |
Type: Gain Description: Gain factor |
|
| Prod_2_2 |
Type: Prod_2 Description: Product of two influencing factors |
|
| CID_norm |
Type: Gain Description: Gain factor |
|
| CIM |
Type: Tabular Description: Tabular function |
|
| MSL |
Type: Gain Description: Gain factor |
|
| NRFR |
Type: Gain Description: Gain factor |
|
| ECIR |
Type: Gain Description: Gain factor |
|
| Prod_3_1 |
Type: Prod_3 Description: Product of three influencing factors |
|
| NREM |
Type: Tabular Description: Tabular function |
|
| CIR |
Type: Division Description: Output first input divided by second input |
|
| Source4 |
Type: Source Description: This is the (dummy) source model of System Dynamics |
|
| P_Generation |
Type: Rate_1 Description: Unrestricted rate element with one influencing variable |
|
| Pollution |
Type: Reverse_Level Description: Level of the System Dynamics methodology with time reversal |
|
| P_Absorption |
Type: Rate_1 Description: Unrestricted rate element with one influencing variable |
|
| Sink4 |
Type: Sink Description: This is the (dummy) sink model of System Dynamics |
|
| NotCIAF |
Type: Linear Description: Linear function |
|
| Pol_Ratio |
Type: Gain Description: Gain factor |
|
| FCM |
Type: Tabular Description: Tabular function |
|
| Prod_3_2 |
Type: Prod_3 Description: Product of three influencing factors |
|
| Food_Ratio |
Type: Gain Description: Gain factor |
|
| Source5 |
Type: Source Description: This is the (dummy) source model of System Dynamics |
|
| CIAFG |
Type: Rate_1 Description: Unrestricted rate element with one influencing variable |
|
| CIAF |
Type: Reverse_Level Description: Level of the System Dynamics methodology with time reversal |
|
| CIAFD |
Type: Rate_1 Description: Unrestricted rate element with one influencing variable |
|
| Sink5 |
Type: Sink Description: This is the (dummy) sink model of System Dynamics |
|
| CIAF_D |
Type: Gain Description: Gain factor |
|
| CIAF_G |
Type: Gain Description: Gain factor |
|
| Prod_2_3 |
Type: Prod_2 Description: Product of two influencing factors |
|
| P_Abs |
Type: Division Description: Output first input divided by second input |
|
| Prod_2_4 |
Type: Prod_2 Description: Product of two influencing factors |
|
| POLCM |
Type: Tabular Description: Tabular function |
|
| POLAT |
Type: Tabular Description: Tabular function |
|
| CFIFR |
Type: Tabular Description: Tabular function |
|
| FPM |
Type: Tabular Description: Tabular function |
|
| Prod_2_5 |
Type: Prod_2 Description: Product of two influencing factors |
|
| CIRA |
Type: Gain Description: Gain factor |
|
| FPCI |
Type: Tabular Description: Tabular function |
|
| CIQR |
Type: Tabular Description: Tabular function |
|
| QLMF |
Type: Division Description: Output first input divided by second input |
|
| QLM |
Type: Tabular Description: Tabular function |
|
| QLF |
Type: Tabular Description: Tabular function |
|
| Prod_4_1 |
Type: Prod_4 Description: Product of four influencing factors |
|
| QLC |
Type: Tabular Description: Tabular function |
|
| QLP |
Type: Tabular Description: Tabular function |
|
| Quality_of_Life |
Type: Gain Description: Gain factor |
|
| NR_norm |
Type: Parameter_Change Description: Parameter variation of WORLD2 model |
|
| Pol_norm |
Type: Parameter_Change Description: Parameter variation of WORLD2 model |
|
| DR_norm |
Type: Parameter_Change Description: Parameter variation of WORLD2 model |