WOLFRAM SYSTEM MODELER
Human_Ecological_FootprintEcological footprint |
|
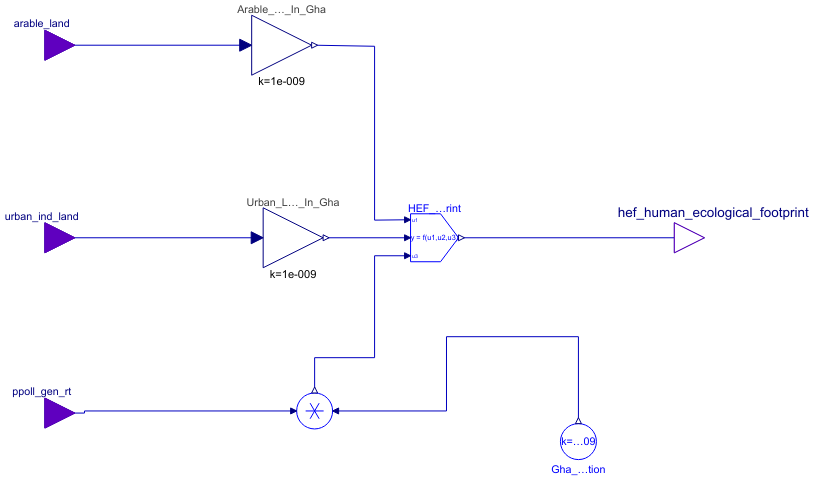
Diagram
Wolfram Language
In[1]:=
SystemModel["SystemDynamics.WorldDynamics.World3.Human_Ecological_Footprint"]
Out[1]:=
Information
The ecological footprint is a concept developed by Mathis Wackernagel and his co-workers. It attempts to quantify the percentage of the planet's carrying capacity being used up by humanity at any given point in time. Wackernagel showed that, since the 1980s, humanity is spending more resources per time unit than the planet can regenerate in a sustainable fashion.
The human ecological footprint is measured in hectares per person.
Connectors (4)
| urban_ind_land |
Type: MassInPort Description: Land occupied by human dwellings and industry |
|
|---|---|---|
| arable_land |
Type: MassInPort Description: Arable land |
|
| ppoll_gen_rt |
Type: MassInPort Description: Persistent pollution generation rate |
|
| hef_human_ecological_footprint |
Type: MassOutPort Description: Ecological footprint |
Components (5)
| Arable_Land_In_Gha |
Type: Gain Description: Output the product of a gain value with the input signal |
|
|---|---|---|
| Urban_Land_In_Gha |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| Absorption_Land_In_Gha |
Type: Prod_2 Description: Product of two influencing factors |
|
| Gha_Per_Unit_Of_Pollution |
Type: Const Description: A constant factor |
|
| HEF_Human_Ecological_Footprint |
Type: HEF_Human_Ecological_Footprint Description: Human ecological footprint |
Used in Examples (11)
|
SystemDynamics.WorldDynamics.World3 Original WORLD3 model |
|
|
SystemDynamics.WorldDynamics.World3 More abundant non-recoverable natural resources |
|
|
SystemDynamics.WorldDynamics.World3 More accessible non-recoverable natural resources and pollution control |
|
|
SystemDynamics.WorldDynamics.World3 More accessible non-recoverable natural resources, pollution control, and land yield enhancement |
|
|
SystemDynamics.WorldDynamics.World3 More accessible non-recoverable natural resources, pollution control, land yield enhancement, and erosion protection |
|
|
SystemDynamics.WorldDynamics.World3 More accessible non-recoverable natural resources, pollution control, land yield enhancement, erosion protection, and resource efficiency |
|
|
SystemDynamics.WorldDynamics.World3 More abundant non-recoverable natural resources and birth control |
|
|
SystemDynamics.WorldDynamics.World3 More abundant non-recoverable natural resources, birth control, and stable industrial output |
|
|
SystemDynamics.WorldDynamics.World3 Combining the measures of Scenarios #6 and #8 |
|
|
SystemDynamics.WorldDynamics.World3 Influencing the future 20 years earlier |
|
|
SystemDynamics.WorldDynamics.World3 Influencing the future 10 years later |