

FrenetSerretSystem
FrenetSerretSystem[{x1,…,xn},t]
gives the generalized curvatures and Frenet–Serret basis for the parametric curve xi[t].
FrenetSerretSystem[{x1,…,xn},t,chart]
interprets the xi as coordinates in the specified coordinate chart.
Details
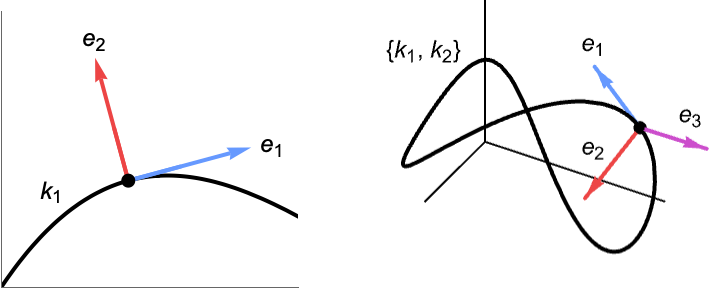
- FrenetSerretSystem returns {{k1,…,kn-1},{e1,…,en}}, where ki are generalized curvatures and ei are the Frenet–Serret basis vectors.
- The first basis vector e1 is the unit tangent to the curve. Each successive vector is the orthonormalized derivative of the previous one. The last vector is chosen to complete a right-handed orthonormal basis.
- If one of the vector derivatives is zero, then the remaining vectors are also taken to be zero.
- Common names in dimension two and three are:
-
{{k1},{e1,e2}} signed curvature, tangent, and normal {{k1,k2},{e1,e2,e3}} curvature, torsion, tangent, normal, and binormal - In FrenetSerretSystem[x,t], if x is a scalar expression, FrenetSerretSystem gives the curvature of the parametric curve {t,x}.
- If a chart is specified, the basis vectors ei are expressed in the orthonormal basis associated to it.
- Coordinate charts in the third argument of FrenetSerretSystem can be specified as triples {coordsys,metric,dim} in the same way as in the first argument of CoordinateChartData. The short form in which dim is omitted may be used.
Examples
open all close allBasic Examples (2)
The curvature, tangent, and normal for a circle in two dimensions:
FrenetSerretSystem[{Cos[t], Sin[t]}, t]The curvature, torsion, and associated basis for a helix expressed in cylindrical coordinates:
FrenetSerretSystem[{1, t, t / 4}, t, "Cylindrical"]ParametricPlot3D[CoordinateTransform["Cylindrical" -> "Cartesian", {1, t, t / 4}]//Evaluate, {t, 0, 4Pi}, PlotStyle -> Thick]Scope (6)
A straight line is degenerate, and so the basis is padded with zero vectors:
FrenetSerretSystem[{1, a t, b t}, t]Curvature, torsion, and associated basis of a spiral restricted to a plane:
Simplify[FrenetSerretSystem[{(t Cos[t]/Sqrt[2]), t Sin[t], -(t Cos[t]/Sqrt[2])}, t], t∈Reals]ParametricPlot3D[{(t Cos[t]/Sqrt[2]), t Sin[t], -(t Cos[t]/Sqrt[2])}, {t, 0, 6Pi}, PlotStyle -> Thick]Construct the unit normal and tangent to the parabola ![]() :
:
FrenetSerretSystem[a x ^ 2 + b x + c, x]The Frenet–Serret system specifying metric, coordinate system, and parameters:
Simplify[FrenetSerretSystem[{t / 2, t}, t, {{"Elliptic", {1}}, "Euclidean"}]]ParametricPlot[CoordinateTransform[{{"Elliptic", {1}}, "Euclidean"} -> "Cartesian", {t / 2, t}]//Evaluate, {t, 0, 2Pi}, PlotStyle -> Thick]A curve with nonzero tangent, normal, binormal, and trinormal:
FrenetSerretSystem[{Cos[θ], Sin[θ], Sin[2θ], Cos[2θ]}, θ]//SimplifyFrenetSerretSystem works in curved spaces:
FrenetSerretSystem[{t, t ^ 2}, t, {"Stereographic", "Sphere"}]Applications (3)
Determine if two space curves intersect in a plane by checking the equality of their binormals:
c[t_] := {Cos[t], Sin[t], t ^ 2}
d[t_] := {1 - (Sin[t]/Sqrt[5]), -1 + Cos[t], (2 Sin[t]/Sqrt[5])}c[0] == d[0]Simplify[FrenetSerretSystem[c[t], t][[-1, -1]] == FrenetSerretSystem[d[t], t][[-1, -1]] /. t -> 0]Two curves in Euclidean space can be overlaid by rigid motion if and only if their curvatures are equal as functions of arc length:
c1[t_] := {(2 E^t/3) - (1/3) E^t Cos[t] + (2/3) E^t Sin[t], -(E^t/3) + (2/3) E^t Cos[t] + (2/3) E^t Sin[t], (2 E^t/3) + (2/3) E^t Cos[t] - (1/3) E^t Sin[t]}c2[t_] := {6 + (1/5) (-2 + Sqrt[2]) t + Sqrt[(2/5)] t Cos[Log[t]] + (1/5) (1 + 2 Sqrt[2]) t Sin[Log[t]], 12 - (t/Sqrt[10]) + (t Cos[Log[t]]/Sqrt[2]) - Sqrt[(2/5)] t Sin[Log[t]], 18 + (1/10) (8 + Sqrt[2]) t + (t Cos[Log[t]]/Sqrt[10]) + (1/5) (-2 + Sqrt[2]) t Sin[Log[t]]}Show[ParametricPlot3D[c1[t], {t, 0, Pi}, PlotStyle -> Thick], ParametricPlot3D[c2[t], {t, Exp[-4Pi], Exp[Pi]}, PlotStyle -> {Thick, ColorData[96, 2]}], PlotRange -> All]As parameterized, the curves appear to have different curvatures:
k1[t_] = Simplify[First@FrenetSerretSystem[c1[t], t], t∈Reals]k2[t_] = Simplify[First@FrenetSerretSystem[c2[t], t], t > 0]But re-expressing the curvatures in terms of arc length shows that the curves are related by a rigid motion:
Solve[ArcLength[c1[u], {u, -∞, t}] == s, t, Reals]Solve[ArcLength[c2[u], {u, 0, t}] == s, t]k1[Log[(s/Sqrt[3])]] == k2[(s/Sqrt[3])]Construct an osculating circle, which is the circle that best approximates the curve at a point:
c[t_] := Sqrt[t]{Cos[t], Sin[t]}sys = FrenetSerretSystem[c[t], t]//SimplifyThe radius of the osculating circle is inverse to the curvature:
rad[t_] = 1 / sys[[1, 1]];The center of the circle lies along the normal to the curve at the contact point:
normal[t_] = sys[[2, 2]];osculatingCircle[t_] = Circle[c[t] + rad[t] * normal[t], rad[t]]Plot the curve with two osculating circles and points of contact:
ParametricPlot[c[t], {t, 0, 3Pi}, PlotStyle -> Thick, Epilog -> {Magenta, Dashed, PointSize[.03], Point[c[Pi / 4]], osculatingCircle[Pi / 4], Point[c[5Pi / 4]], osculatingCircle[5Pi / 4]}]Properties & Relations (7)
In dimension ![]() , the first
, the first ![]() curvatures are always non-negative, but the last can be negative:
curvatures are always non-negative, but the last can be negative:
First[FrenetSerretSystem[{t ^ 2, t, Sin[t], Cos[t]}, t]]//SimplifyFirst[FrenetSerretSystem[{-t ^ 2, t, Sin[t], Cos[t]}, t]]//SimplifyIn two dimensions, the curvature is signed:
Simplify[FrenetSerretSystem[{r Cos[t], r Sin[t]}, t], r > 0]Simplify[FrenetSerretSystem[{r Cos[t], -r Sin[t]}, t], r > 0]In dimensions three and higher, the ArcCurvature is the first generalized curvature:
ArcCurvature[{t, t ^ 2, t ^ 3}, t] == FrenetSerretSystem[{t, t ^ 2, t ^ 3}, t][[1, 1]]In dimension two, the ArcCurvature is the absolute value of the single generalized curvature:
ArcCurvature[{1, -t}, t, "Polar"] == Abs[FrenetSerretSystem[{1, -t}, t, "Polar" ][[1, 1]]]In two dimensions, the normal is always rotated counterclockwise relative to the tangent:
limacon2[s_] = {Cos[s] (2 + Cos[3s]), (2 + Cos[3s]) Sin[s]};
{{k2[s_]}, {t2[s_], n2[s_]}} = FrenetSerretSystem[limacon2[s], s];n2[s] == RotationTransform[Pi / 2][t2[s]]//SimplifyWhen the curve is embedded in three-space, the normal can be rotated in either direction:
limacon3[s_] = {Cos[s](2 + Cos[3 s]), (2 + Cos[3s])Sin[s], 0};{{k3[s_], τ3[s_]}, {t3[s_], n3[s_], b3[s_]}} = FrenetSerretSystem[limacon3[s], s]//Simplify;n3[0] == RotationTransform[Pi / 2, {0, 0, 1}][t3[0]]//Simplifyn3[1] == RotationTransform[-Pi / 2, {0, 0, 1}][t3[1]]The change in direction happens when the curvature crosses zero:
{k2[0], k2[1]}//NThe normal and binormal are undefined at the crossing, then reverse direction:
{b3[0], b3[1]}//NParametricPlot[limacon2[s], {s, 0, 2Pi}, Epilog -> {Magenta, PointSize[.05], Point[{limacon2[0], limacon2[1]}]}]In Euclidean space, if only the last curvature is identically 0, the curve lies in a hyperplane:
cloth[u_] := {1 - FresnelC[u] / 3 + (2 * FresnelS[u]) / 3, -1 + (2 * FresnelC[u]) / 3 + (2 * FresnelS[u]) / 3, 1 + (2 * FresnelC[u]) / 3 - FresnelS[u] / 3}First@Simplify[FrenetSerretSystem[cloth[u], u], u > 0]That hyperplane is perpendicular to the last basis vector, in this case the binormal:
binormal = Simplify[FrenetSerretSystem[cloth[u], u][[-1, -1]], u > 0]Simplify[(cloth[u1] - cloth[u2]).binormal, u > 0]Plot the plane containing the curve, using a point on the curve and the tangent and normal at that point:
plane = ParametricPlot3D[cloth[0.01] + {t, u}.(FrenetSerretSystem[cloth[s], s] /. s -> 0.01)[[2, 1 ;; 2]] //Evaluate, {t, -1, 1}, {u, -1, 1}, PlotStyle -> Directive[ColorData["DefaultPlotColors"][1], Opacity[.3]], Mesh -> None];The curve, hyperplane, and binormal:
Show[ParametricPlot3D[cloth[u], {u, -5, 5}], plane, Graphics3D[{StandardPurple, Arrow[{cloth[0], cloth[0] - binormal}]}], IconizedObject[«view options»]]For a curve embedded in nonplanar surface, no basis vector other than the tangent needs to maintain a constant angle to the surface:
viv = {-(Sin[#] / 2), -Sin[# / 2], (1 / 2) * (1 + Cos[#])}&;basis = Last[FrenetSerretSystem[viv[t], t]]//Simplify;{tangent, normal, binormal} = Map[Arrow[{viv[t], viv[t] + #}]&, basis];Manipulate[Show[ParametricPlot3D[viv[s], {s, 0, 4Pi}, PlotStyle -> {Thick, White}], Graphics3D[{Thick, StandardBlue, tangent, StandardRed, normal, StandardPurple, binormal, Gray, Opacity[0.5], Sphere[]}], PlotRange -> 2]//Evaluate, {t, 0, 4Pi, Appearance -> {"Open", "Labelled"}}]Interactive Examples (1)
The plot of a function with the unit tangent and normal is shown. Click a point to see the unit and tangent at that point:
DynamicModule[{c, b, t, pt, x}, c[t_] = {t, 2 t - 3 t^2 + t^3};b[t_] = Last[FrenetSerretSystem[c[t], t]];x = Dynamic[First[pt]];LocatorPane[Dynamic[pt, (pt = c[First[#]])&], Show[Plot[Last[c[t]], {t, -1, 3}, AspectRatio -> Automatic, PlotRange -> {{-1.5, 3}, {-2, 2}}, PlotHighlighting -> None], Graphics[{Thick, StandardBlue, Arrow[Dynamic /@ {c[x], c[x] + b[x][[1]]}], StandardRed, Arrow[Dynamic /@ {c[x], c[x] + b[x][[2]]}]}]]], Initialization :> (pt = {0, 0})]Neat Examples (1)
The trefoil knot with an animation of the tangent, normal, and binormal moves along the curve:
knot = KnotData["Trefoil", "SpaceCurve"];basis = Last[FrenetSerretSystem[knot[t], t]]//Simplify;{tangent, normal, binormal} = Map[Arrow[{knot[t], knot[t] + #}]&, basis];Manipulate[Show[ParametricPlot3D[knot[s], {s, 0, 2Pi}, PlotStyle -> Thick], Graphics3D[{Thick, StandardBlue, tangent, StandardRed, normal, StandardPurple, binormal}], PlotRange -> 3]//Evaluate, {t, 0, 2Pi, Appearance -> {"Open"}}]Text
Wolfram Research (2014), FrenetSerretSystem, Wolfram Language function, https://reference.wolfram.com/language/ref/FrenetSerretSystem.html.
CMS
Wolfram Language. 2014. "FrenetSerretSystem." Wolfram Language & System Documentation Center. Wolfram Research. https://reference.wolfram.com/language/ref/FrenetSerretSystem.html.
APA
Wolfram Language. (2014). FrenetSerretSystem. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/FrenetSerretSystem.html