KalmanEstimator
KalmanEstimator[ssm,{w,v}]
プロセスノイズと測定ノイズの共分散行列 w と v を伴うStateSpaceModel ssm のKalman推定器を構築する.
KalmanEstimator[ssm,{w,v,h}]
相互共分散行列 h を含む.
KalmanEstimator[{ssm,sensors},{…}]
ssm のノイズの多い測定値として sensors を指定する.
KalmanEstimator[{ssm,sensors,dinputs},{…}]
ssm の決定論的入力として dinputs を指定する.
詳細とオプション



- 標準状態空間モデル ssm はStateSpaceModel[{a,b,c,d}]として与えることができる.ただし,a, b, c, d はそれぞれ,連続時間系あるいは離散時間系の,状態,入力,出力,伝送の各行列を表す.
-

連続時間系 
離散時間系 - ディスクリプタ状態空間モデル ssm は,連続時間あるいは離散時間の,StateSpaceModel[{a,b,c,d,e}]で与えることができる.
-

連続時間系 
離散時間系 - 入力
 は決定論的入力
は決定論的入力  と同様にプロセスノイズ
と同様にプロセスノイズ  を含むことができる.
を含むことができる. - 引数 dinputs は
 における
における  の位置を指定する整数のリストである.
の位置を指定する整数のリストである. - 出力
 は他の出力と同様にノイズの多い測定値
は他の出力と同様にノイズの多い測定値  からなる.
からなる. - 引数 sensors は
 における
における  の位置を指定する整数のリストである.
の位置を指定する整数のリストである. - 引数 sensors および dinputs は値AllおよびNoneも許容する.
- KalmanEstimator[ssm,{…}]はKalmanEstimator[{ssm,All,None},{…}]に等しい.
- ノイズの多い測定値は
 でモデル化される.ただし,
でモデル化される.ただし, および
および  は
は  に関連する
に関連する  および
および  の部分行列であり,
の部分行列であり, はノイズである.
はノイズである. - プロセスノイズと測定ノイズはホワイトノイズおよびガウスノイズであると考えられる.
-
 ,
, 
プロセスノイズ  ,
, 
測定ノイズ - プロセスノイズと測定ノイズ間の相互共分散は
 で与えられる.
で与えられる. - デフォルトで,相互共分散行列
 は零行列であるとみなされる.
は零行列であるとみなされる. - KalmanEstimatorはMethodオプションをサポートする.次は使用可能な明示的設定値である.
-
"CurrentEstimator" 現在の推定器を構築する "PredictionEstimator" 予測推定器を構築する - 現在の推定値は現時点までの測定値に基づく.
- 予測の推定値は前の時点までの推定値に基づく.
- 連続時間系では,現行推定器と予測推定器は等しく,推定器ダイナミクスは
 で与えられる.
で与えられる. - 連続時間系の最適化ゲインは
![l=x_r.c_n.TemplateBox[{r}, Inverse]](Files/KalmanEstimator.ja/28.png "l=x_r.c_n.TemplateBox[{r}, Inverse]") で計算される.ただし,
で計算される.ただし, は連続代数リッカティ方程式
は連続代数リッカティ方程式 ![a.x_r+x_r.a-x_r.c_n.TemplateBox[{r}, Inverse].c_n.x_r+b_w.q.b_w=0](Files/KalmanEstimator.ja/30.png "a.x_r+x_r.a-x_r.c_n.TemplateBox[{r}, Inverse].c_n.x_r+b_w.q.b_w=0") を解く.
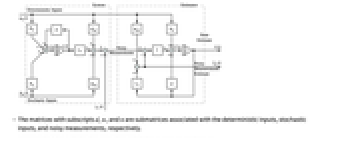
を解く. - 推定器を持つ連続時間系のブロック図
- 下付き文字
 ,
, ,
, を持つ行列は決定論的入力,確率論的入力,ノイズの多い測定値にそれぞれ関連した部分行列である
を持つ行列は決定論的入力,確率論的入力,ノイズの多い測定値にそれぞれ関連した部分行列である - 離散時間系では,予測推定器のダイナミクスは
 で与えられる.予測推定器を持つ離散時間系のブロック図は上記に等しい.
で与えられる.予測推定器を持つ離散時間系のブロック図は上記に等しい. - 離散時間系の現在の推定器の推定器ダイナミクスは
 であり,現在の状態推定値
であり,現在の状態推定値  は現在の測定値
は現在の測定値  から
から  として得られる.
として得られる. - 離散時間系の現行推定器も最適ゲインは
![l_c=(x_r.c_n+b_w.h).TemplateBox[{{(, {{{c, _, n}, ., {x, _, r}, ., {{c, _, n}, }}, +, {{c, _, n}, ., {b, _, w}, ., h}, +, {{h, }, ., {{b, _, w}, }, ., {{c, _, n}, }}, +, v}, )}}, Inverse]](Files/KalmanEstimator.ja/40.png "l_c=(x_r.c_n+b_w.h).TemplateBox[{{(, {{{c, _, n}, ., {x, _, r}, ., {{c, _, n}, }}, +, {{c, _, n}, ., {b, _, w}, ., h}, +, {{h, }, ., {{b, _, w}, }, ., {{c, _, n}, }}, +, v}, )}}, Inverse]") で計算される.
で計算される. は離散代数リッカティ方程式
は離散代数リッカティ方程式  を解く.
を解く. - 離散時間系についての予測推定器の最適ゲイン
 は
は  として計算される.
として計算される. - 現在の推定器を持つ離散時間系のブロック図
- Kalman推定器モデルへの入力は決定論的入力
 とノイズの多い測定値
とノイズの多い測定値  である,
である, - Kalman推定器モデルの出力は推定状態
 とノイズの多い測定値の推定値
とノイズの多い測定値の推定値  からなる.
からなる.  が特異値ではなく,ペア
が特異値ではなく,ペア が検出可能で,
が検出可能で, が任意の
が任意の  について安定化可能であれば,最適化推定器は漸近的に安定である.
について安定化可能であれば,最適化推定器は漸近的に安定である.

例題
すべて開くすべて閉じるスコープ (5)
アプリケーション (2)
特性と関係 (2)
テキスト
Wolfram Research (2010), KalmanEstimator, Wolfram言語関数, https://reference.wolfram.com/language/ref/KalmanEstimator.html (2012年に更新).
CMS
Wolfram Language. 2010. "KalmanEstimator." Wolfram Language & System Documentation Center. Wolfram Research. Last Modified 2012. https://reference.wolfram.com/language/ref/KalmanEstimator.html.
APA
Wolfram Language. (2010). KalmanEstimator. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/KalmanEstimator.html