KalmanEstimator
KalmanEstimator[ssm,{w,v}]
对于具有过程和测量噪声协方差矩阵 w 和 v 的 StateSpaceModel ssm,构建卡尔曼估值器.
KalmanEstimator[ssm,{w,v,h}]
包含交叉耦合矩阵 h.
KalmanEstimator[{ssm,sensors},{…}]
将 sensors 指定为 ssm 的噪声测量.
KalmanEstimator[{ssm,sensors,dinputs},{…}]
将 dinputs 指定为 ssm 的决定性输入.
更多信息和选项



- 标准状态空间模型 ssm 可以以 StateSpaceModel[{a,b,c,d}] 形式给出,其中 a、b、c 和 d 表示连续时间或者离散时间系统中的状态、输入、输出和传递矩阵:
-

连续时间系统 
离散时间系统 - 连续时间或者离散时间中,描述性状态空间模型 ssm 可以以 StateSpaceModel[{a,b,c,d,e}] 形式给出:
-

连续时间系统 
离散时间系统 - 输入
 可以包含过程噪声
可以包含过程噪声  以及决定性输入
以及决定性输入  .
. - 参数 dinputs 是指定
 中
中  的位置的整数列表.
的位置的整数列表. - 输出
 包含噪声测量
包含噪声测量  以及其他输出.
以及其他输出. - 参数 sensors 是指定
 中
中  的位置的整数列表.
的位置的整数列表. - 参数 sensors 和 dinputs 也可以接受数值 All 和 None.
- KalmanEstimator[ssm,{…}] 等价于 KalmanEstimator[{ssm,All,None},{…}].
- 噪声测量根据
 建模,其中
建模,其中  和
和  是与
是与  相关的子矩阵
相关的子矩阵  和
和  ,而
,而  是噪声.
是噪声. - 假定过程和测量噪声是白噪声以及高斯噪声:
-
 ,
, 
过程噪声  ,
, 
测量噪声 - 过程噪声和测量噪声之间的互协方差由
 给出.
给出. - 默认情况下,假定互协方差矩阵
 为一个零矩阵.
为一个零矩阵. - KalmanEstimator 支持 Method 选项. 可以给出下列明确设置:
-
"CurrentEstimator" 构建当前估值器 "PredictionEstimator" 构建预测估值器 - 当前估计值基于到当前瞬时为止的测量值.
- 预测估计值基于到前一瞬时为止的测量值.
- 对于标准连续时间系统,当前和预测估值器相同,而估值器动态根据
 给出.
给出. - 连续时间系统的最优增益根据
![l=x_r.c_n.TemplateBox[{r}, Inverse]](Files/KalmanEstimator.zh/28.png "l=x_r.c_n.TemplateBox[{r}, Inverse]") 计算,其中
计算,其中  求解连续代数黎卡提方程
求解连续代数黎卡提方程 ![a.x_r+x_r.a-x_r.c_n.TemplateBox[{r}, Inverse].c_n.x_r+b_w.q.b_w=0](Files/KalmanEstimator.zh/30.png "a.x_r+x_r.a-x_r.c_n.TemplateBox[{r}, Inverse].c_n.x_r+b_w.q.b_w=0") .
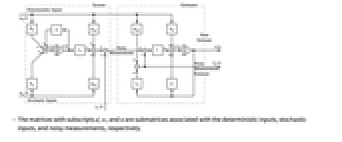
. - 具有估值器的连续时间系统的方框图:
- 具有下标
 、
、 和
和  的矩阵是分别与确定性输入、随机输入和噪声测量值相关联的子矩阵.
的矩阵是分别与确定性输入、随机输入和噪声测量值相关联的子矩阵. - 对于离散时间系统,预测估值器的动态性由
 给出. 具有预测估值器的离散时间系统的方框图与上图相同.
给出. 具有预测估值器的离散时间系统的方框图与上图相同. - 对于离散时间系统,当前估值器的动态性为
 ,而当前状态估计值
,而当前状态估计值  从当前测量值
从当前测量值  得到,为
得到,为  .
. - 离散时间系统的最优裕值根据
![l_c=(x_r.c_n+b_w.h).TemplateBox[{{(, {{{c, _, n}, ., {x, _, r}, ., {{c, _, n}, }}, +, {{c, _, n}, ., {b, _, w}, ., h}, +, {{h, }, ., {{b, _, w}, }, ., {{c, _, n}, }}, +, v}, )}}, Inverse]](Files/KalmanEstimator.zh/40.png "l_c=(x_r.c_n+b_w.h).TemplateBox[{{(, {{{c, _, n}, ., {x, _, r}, ., {{c, _, n}, }}, +, {{c, _, n}, ., {b, _, w}, ., h}, +, {{h, }, ., {{b, _, w}, }, ., {{c, _, n}, }}, +, v}, )}}, Inverse]") 计算,其中
计算,其中  求解离散代数黎卡提方程
求解离散代数黎卡提方程  .
. - 可用
 计算离散时间系统的预测估值器的最佳增益
计算离散时间系统的预测估值器的最佳增益  .
. - 具有当前估值器的离散时间系统的方框图:
- 卡尔曼估值器模型的输入是确定性输入
 和噪声测量值
和噪声测量值  .
. - 卡尔曼估值器模型的输出包含所估计的状态
 以及噪声测量值
以及噪声测量值  的估计值.
的估计值. - 如果
 是非奇异的,组对
是非奇异的,组对  是可探测的,并且对于任意
是可探测的,并且对于任意  ,
, 是可镇定的,那么该最优估值器是渐进稳定的.
是可镇定的,那么该最优估值器是渐进稳定的.

范例
打开所有单元关闭所有单元范围 (5)
应用 (2)
属性和关系 (2)
Wolfram Research (2010),KalmanEstimator,Wolfram 语言函数,https://reference.wolfram.com/language/ref/KalmanEstimator.html (更新于 2012 年).
文本
Wolfram Research (2010),KalmanEstimator,Wolfram 语言函数,https://reference.wolfram.com/language/ref/KalmanEstimator.html (更新于 2012 年).
CMS
Wolfram 语言. 2010. "KalmanEstimator." Wolfram 语言与系统参考资料中心. Wolfram Research. 最新版本 2012. https://reference.wolfram.com/language/ref/KalmanEstimator.html.
APA
Wolfram 语言. (2010). KalmanEstimator. Wolfram 语言与系统参考资料中心. 追溯自 https://reference.wolfram.com/language/ref/KalmanEstimator.html 年