StateSpaceRealization
是 StateSpaceModel 的一个选项,指定它的正则表示.
更多信息


- 可使用以下设置:
-
Automatic 自动确定实现 "Controllable" 可控型实现 "ControllableCompanion" 可控性伴型实现 "Observable" 可观测型实现 "ObservableCompanion" 可观测性伴型实现 - 可控制形式通过计算对应于每个输入的子系统的可控制同伴形式,并且合并结果获得.
- 对于恰当传递函数矩阵
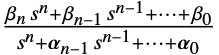 ,可控制同伴形式是
,可控制同伴形式是 -
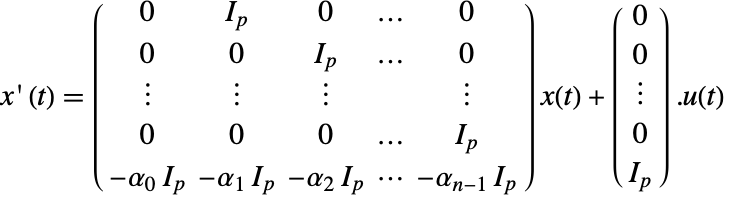
-

- 恒等矩阵
 的维度为
的维度为  .
. - 可观测形式通过计算对应于每个输出的子系统的同伴形式,并合并结果获得.
- 对于恰当传递函数矩阵
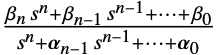 ,可观测同伴形式是
,可观测同伴形式是 -
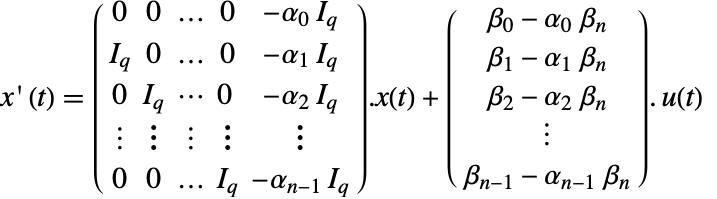
-

- 对于离散时间系统,实现是相似的.
- 对于不恰当传递函数
 ,多项式部分使用描述器变量实现,而恰当有理部分使用指定形式实现. »
,多项式部分使用描述器变量实现,而恰当有理部分使用指定形式实现. » - StateSpaceModel[tfm,StateSpaceRealization->Automatic] 给出传递函数模型 tfm 的可控制实现.
范例
打开所有单元关闭所有单元属性和关系 (4)
StateSpaceRealization 影响不恰当传递函数的恰当部分:
Wolfram Research (2010),StateSpaceRealization,Wolfram 语言函数,https://reference.wolfram.com/language/ref/StateSpaceRealization.html (更新于 2012 年).
文本
Wolfram Research (2010),StateSpaceRealization,Wolfram 语言函数,https://reference.wolfram.com/language/ref/StateSpaceRealization.html (更新于 2012 年).
CMS
Wolfram 语言. 2010. "StateSpaceRealization." Wolfram 语言与系统参考资料中心. Wolfram Research. 最新版本 2012. https://reference.wolfram.com/language/ref/StateSpaceRealization.html.
APA
Wolfram 语言. (2010). StateSpaceRealization. Wolfram 语言与系统参考资料中心. 追溯自 https://reference.wolfram.com/language/ref/StateSpaceRealization.html 年