WOLFRAM SYSTEM MODELER
LongitudinalMotionState space representation of longitudinal motion |
|
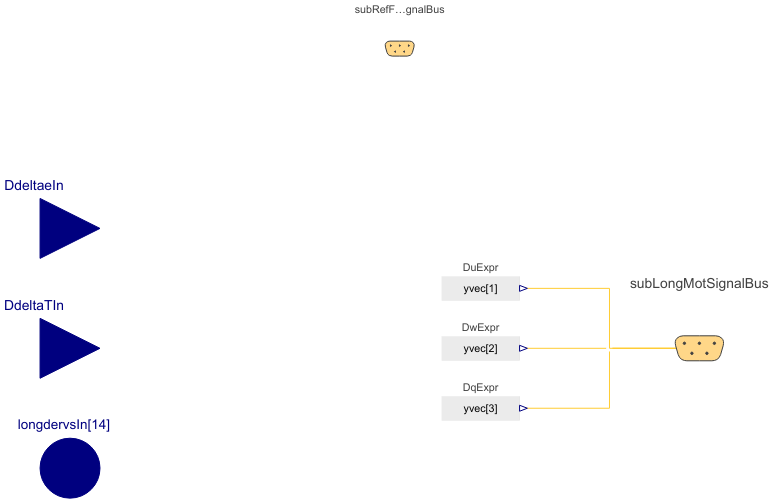
Diagram
Wolfram Language
In[1]:=
SystemModel["Aircraft.StateSpace.FixedWing.Blocks.LongitudinalMotion"]
Out[1]:=
Information
This model compiles the linearized state space representation of the longitudinal motion (in body frame) of an aircraft. The linearization is done over the reference flight conditions that are inputs from the subRefFlightSignalBus connector, and the states, inputs and outputs are perturbations from the reference flight conditions.
Other inputs to this model are the perturbations to the control actuators: DeltaeIn (Δδe) for elevator deflection perturbation and DdeltaTIn (ΔδT) for throttle position perturbation. Additionally, the longitudinal stability and control derivatives are inputs through the longdervsIn connector. The output from this model is the output vector yvec through the subLongMotSignalBus bus port.
The state space representation of the longitudinal motion is in the following form

where x is the state vector and η is the control vector consisting of different perturbation components that are described in Table 1. The matrices A and B contain the stability and control derivatives, respectively. The output vector y consists of the three first components of x in Table 1. [1]
Table 1: Perturbation components of state and control vectors in state space representation of longitudinal motion.
| Vector | Perturbation component |
| x | Δu axial velocity |
| Δw normal velocity | |
| Δq pitch rate | |
| Δθ pitch angle | |
| η | Δδe elevator deflection |
| ΔδT throttle position |
References
[1] Nelson, R. C. (1998) Flight Stability and Automatic Control. 2nd ed. McGraw-Hill.
Available at: http://home.eng.iastate.edu/~shermanp/AERE355/lectures/Flight_Stability_and_Automatic_Control_N.pdf.
Parameters (1)
| nEng |
Type: Integer Description: Number of engines |
|---|
Connectors (5)
| DdeltaeIn |
Type: RealInput Description: Elevator deflection perturbation input |
|
|---|---|---|
| DdeltaTIn |
Type: RealInput Description: Throttle perturbation input |
|
| longdervsIn |
Type: RealVectorInput[14] Description: Input vector of longitudinal derivatives |
|
| subLongMotSignalBus |
Type: MotionSignalBus Description: Bus port for output vector output |
|
| subRefFlightSignalBus |
Type: RefFlightSignalBus Description: Bus port for reference flight conditions input |
Components (3)
| DuExpr |
Type: RealExpression Description: Set output signal to a time varying Real expression |
|
|---|---|---|
| DwExpr |
Type: RealExpression Description: Set output signal to a time varying Real expression |
|
| DqExpr |
Type: RealExpression Description: Set output signal to a time varying Real expression |
Used in Components (1)
|
Aircraft.StateSpace.FixedWing Aircraft model using state-space representation |