WOLFRAM SYSTEM MODELER
ControlledMotorGearPendulumA controlled inverted pendulum system |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Modeling.ControlledMotorGearPendulum"]
Out[1]:=
Information
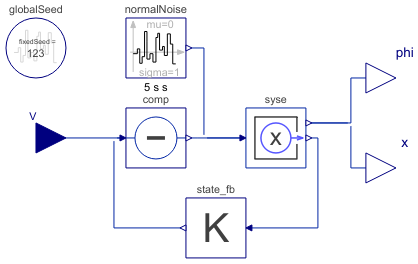
This system consists of an electrical motor, a gear, and a pendulum connected to a cart. The position of the cart is controlled using state feedback. The first priority of the controller is to make sure that the pendulum stays in an upright position.
Connectors (3)
| V |
Type: RealInput Description: Disturbance voltage |
|
|---|---|---|
| phi |
Type: RealOutput Description: Angle of the pendulum with respect to the vertical |
|
| x |
Type: RealOutput Description: Horizontal position of the cart |
Components (5)
| globalSeed |
Type: GlobalSeed Description: Defines global settings for the blocks of sublibrary Noise, especially a global seed value is defined |
|
|---|---|---|
| normalNoise |
Type: NormalNoise Description: Noise generator with normal distribution |
|
| syse |
Type: MotorGearPendulum_extended Description: A model that encloses a plant and passes its states as outputs |
|
| state_fb |
Type: state_feedback Description: Feedback gain component |
|
| comp |
Type: comparator Description: Comparator model |