WOLFRAM SYSTEM MODELER
SpringOnMassModel for calibration against measurements |
|
Diagram
Wolfram Language
In[1]:=

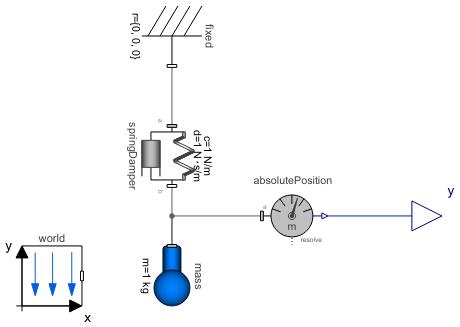
SystemModel["DocumentationExamples.Tutorial.ExternalData.ParameterCalibration.SpringOnMass"]
Out[1]:=
Information
This example is used in the tutorial Using External Data.
The model may contain stylistic improvements compared to the model obtained by following the steps in the tutorial. Examples of stylistic improvements include the use of description strings, model plots, icons, and documentation.
Connectors (1)
| y |
Type: RealOutput Description: 'output Real' as connector |
|---|
Components (5)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| springDamper |
Type: SpringDamperParallel Description: Linear spring and linear damper in parallel |
|
| fixed |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| mass |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| absolutePosition |
Type: AbsolutePosition Description: Measure absolute position vector of the origin of a frame connector |
Used in Examples (1)
|
DocumentationExamples.Tutorial.ExternalData.ParameterCalibration Combination of model to be calibrated and measurement data |