WOLFRAM SYSTEM MODELER
AbsolutePositionMeasure absolute position vector of the origin of a frame connector |
|
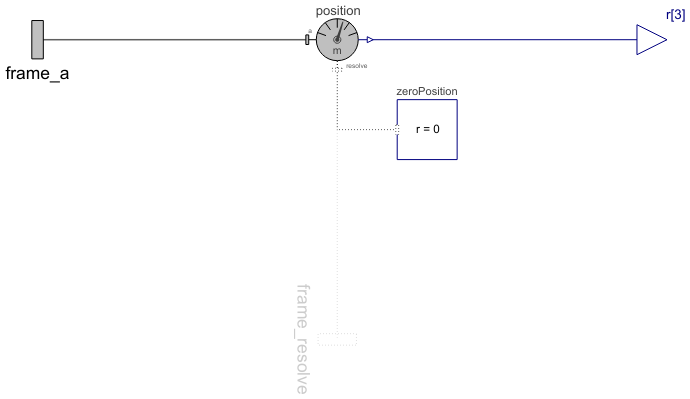
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Sensors.AbsolutePosition"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
The absolute position vector of the origin of frame_a is determined and provided at the output signal connector r.
Via parameter resolveInFrame it is defined, in which frame the position vector is resolved:
| resolveInFrame = Types.ResolveInFrameA. | Meaning |
|---|---|
| world | Resolve vector in world frame |
| frame_a | Resolve vector in frame_a |
| frame_resolve | Resolve vector in frame_resolve |
If resolveInFrame = Types.ResolveInFrameA.frame_resolve, the conditional connector "frame_resolve" is enabled and r is resolved in the frame, to which frame_resolve is connected. Note, if this connector is enabled, it must be connected.
Example
If resolveInFrame = Types.ResolveInFrameA.frame_a, the output vector is computed as:
r = MultiBody.Frames.resolve2(frame_a.R, frame_b.r_0);
Parameters (1)
| resolveInFrame |
Value: Modelica.Mechanics.MultiBody.Types.ResolveInFrameA.frame_a Type: ResolveInFrameA Description: Frame in which output vector r shall be resolved (world, frame_a, or frame_resolve) |
|---|
Connectors (3)
| frame_a |
Type: Frame_a Description: Coordinate system a of which the absolute kinematic quantities are measured |
|
|---|---|---|
| r |
Type: RealOutput[3] Description: Absolute position vector resolved in frame defined by resolveInFrame |
|
| frame_resolve |
Type: Frame_resolve Description: Coordinate system in which output vector r is optionally resolved |
Components (2)
| position |
Type: BasicAbsolutePosition Description: Basic sensor to measure absolute position vector |
|
|---|---|---|
| zeroPosition |
Type: ZeroPosition Description: Set absolute position vector of frame_resolve to a zero vector and the orientation object to a null rotation |
Used in Components (1)
|
Modelica.Mechanics.MultiBody.Sensors Measure absolute kinematic quantities of frame connector |