WOLFRAM SYSTEM MODELER
MultiBodyLibrary to model 3-dimensional mechanical systems |
|
Package Contents
|
User's Guide of MultiBody Library |
|
|
World coordinate system + gravity field + default animation definition |
|
|
Examples that demonstrate the usage of the MultiBody library |
|
|
Components that exert forces and/or torques between frames |
|
|
Functions to transform rotational frame quantities |
|
|
Connectors and partial models for 3-dim. mechanical components |
|
|
Components that constrain the motion between two frames |
|
|
Rigid components such as bodies with mass and inertia and massless rods |
|
|
Sensors to measure variables |
|
|
3-dimensional visual objects used for animation |
|
|
Constants and types with choices, especially to build menus |
|
|
Icons for MultiBody package |
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
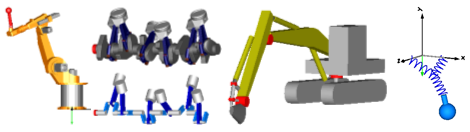
Library MultiBody is a free Modelica package providing 3-dimensional mechanical components to model in a convenient way mechanical systems, such as robots, mechanisms, vehicles. Typical animations generated with this library are shown in the next figure:
For an introduction, have especially a look at:
- MultiBody.UsersGuide discusses the most important aspects how to use this library.
- MultiBody.Examples contains examples that demonstrate the usage of this library.
Copyright © 1998-2025, Modelica Association and contributors
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody"]
Out[1]:=