WOLFRAM SYSTEM MODELER
ControlLogicSatellite controller |
|
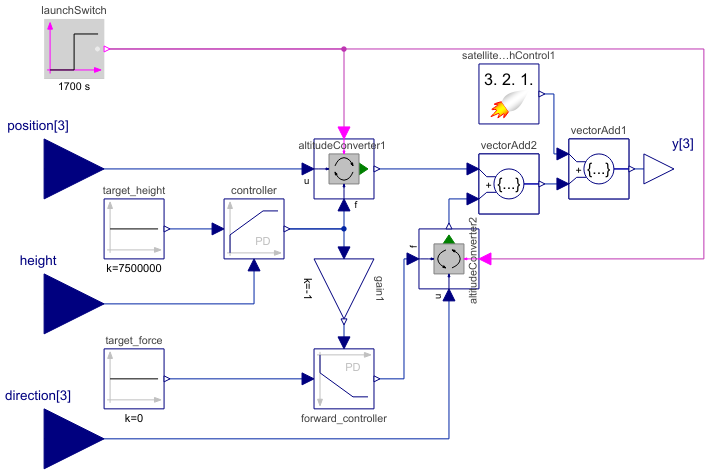
Diagram
Wolfram Language
In[1]:=

SystemModel["EducationExamples.AerospaceEngineering.Satellite.Components.ControlLogic"]
Out[1]:=
Information
This component models the control logic of a satellite. It contains two controllers and some supporting structure around them. The controller components are controller and forward_controller, which control the propulsion forces in the upward and forward directions, respectively. The result of these controllers gets added to the launch sequence forces from the launch component.
Connectors (4)
| height |
Type: RealInput Description: 'input Real' as connector |
|
|---|---|---|
| y |
Type: RealOutput[3] Description: 'output Real' as connector |
|
| position |
Type: RealInput[3] Description: 'input Real' as connector |
|
| direction |
Type: RealInput[3] Description: 'input Real' as connector |
Components (11)
| vectorAdd1 |
Type: VectorAdd Description: Adds threedimensional vectors |
|
|---|---|---|
| altitudeConverter1 |
Type: ForceConversion Description: Models the propulsion force |
|
| satelliteLaunchControl1 |
Type: LaunchControl Description: Models launch forces on the satellite |
|
| controller |
Type: LimPID Description: P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forward |
|
| target_height |
Type: Constant Description: Generate constant signal of type Real |
|
| vectorAdd2 |
Type: VectorAdd Description: Adds threedimensional vectors |
|
| forward_controller |
Type: LimPID Description: P, PI, PD, and PID controller with limited output, anti-windup compensation, setpoint weighting and optional feed-forward |
|
| target_force |
Type: Constant Description: Generate constant signal of type Real |
|
| gain1 |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| altitudeConverter2 |
Type: ForceConversion Description: Models the propulsion force |
|
| launchSwitch |
Type: BooleanStep Description: Generate step signal of type Boolean |
Used in Examples (1)
|
EducationExamples.AerospaceEngineering.Satellite Model scenario of the launch and flight of a satellite. |