WOLFRAM SYSTEM MODELER
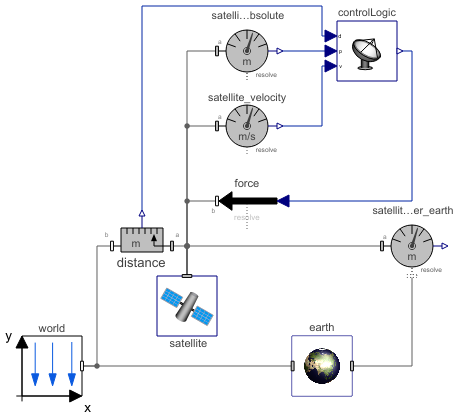
SatelliteScenarioModel scenario of the launch and flight of a satellite. |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.AerospaceEngineering.Satellite.SatelliteScenario"]
Out[1]:=
Information
Model a satellite with a combination of 3D mechanics and block-based control logic. The satellite is launched from the Earth's surface with a launch sequence. Then a control logic subsystem adjusts altitude and velocity via thrusters. The Wolfram Language is used to design the parameters of the control system.
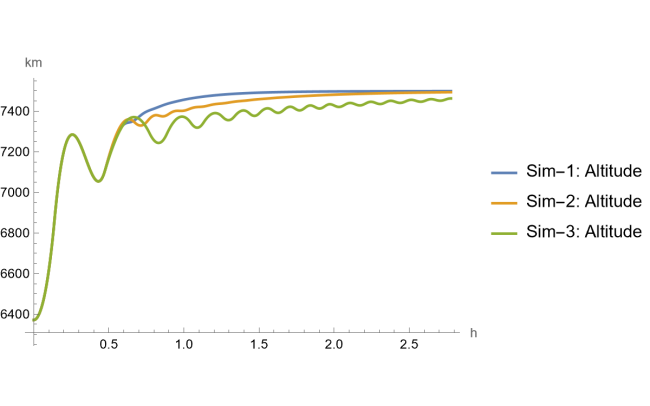
Design Controller
Compare different controller options by the altitude and energy expenditure.
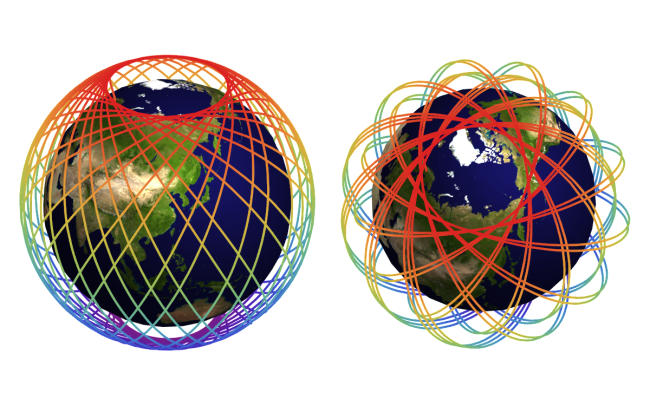
Visualize Trajectory
Visualize the satellite using Wolfram Language functionality for 3D graphics. The images show the satellite path with and without controller.
In order to get the full experience of this example, you need a desktop Wolfram Language product. A free trial download is available at www.wolfram.com/mathematica/trial/
For the full example, open the accompanying notebook Satellite.nb.
Parameters (7)
| launchVehicleMass |
Value: 450000 Type: Mass (kg) Description: Mass of rigid body |
|---|---|
| altitudeController_k |
Value: 10 Type: Real Description: Gain of controller |
| altitudeController_Td |
Value: 2000 Type: Time (s) Description: Time constant of Derivative block |
| forwardController_k |
Value: 0.1 Type: Real Description: Gain of controller |
| forwardController_Td |
Value: 1000 Type: Time (s) Description: Time constant of Derivative block |
| forwardController_yMax |
Value: 1000000 Type: Real Description: Upper limit of output |
| altitudeController_yMax |
Value: 1000000 Type: Real Description: Upper limit of output |
Components (9)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| force |
Type: WorldForce Description: External force acting at frame_b, defined by 3 input signals and resolved in frame world, frame_b or frame_resolve |
|
| distance |
Type: Distance Description: Measure the distance between the origins of two frame connectors |
|
| satellite_position_absolute |
Type: AbsolutePosition Description: Measure absolute position vector of the origin of a frame connector |
|
| satellite_position_over_earth |
Type: AbsolutePosition Description: Measure absolute position vector of the origin of a frame connector |
|
| earth |
Type: Earth Description: Models the mass of the earth |
|
| controlLogic |
Type: ControlLogic Description: Satellite controller |
|
| satellite |
Type: SatelliteMass Description: Models the mass of the satellite |
|
| satellite_velocity |
Type: AbsoluteVelocity Description: Measure absolute velocity vector of origin of frame connector |