WOLFRAM SYSTEM MODELER
RotatingRadialForceRadially directed force with circularly varying direction |
|
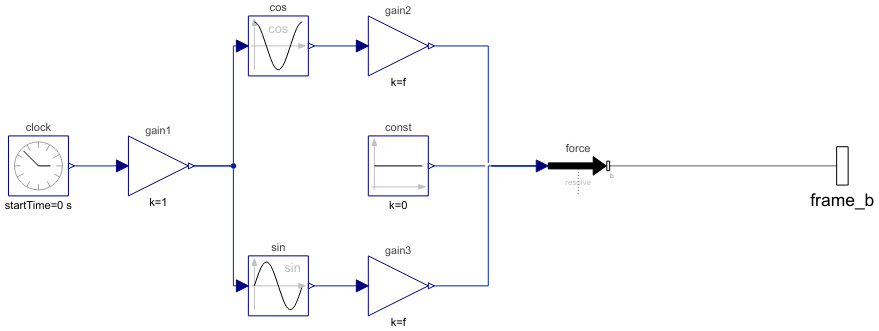
Diagram
Wolfram Language
In[1]:=

SystemModel["EducationExamples.MechanicalEngineering.Joystick.Components.RotatingRadialForce"]
Out[1]:=
Information
This component models a radially directed test force with a circularly varying direction.
Parameters (1)
| f |
Type: Real (N) Description: Force |
|---|
Connectors (1)
| frame_b |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|---|
Components (8)
| force |
Type: WorldForce Description: External force acting at frame_b, defined by 3 input signals and resolved in frame world, frame_b or frame_resolve |
|
|---|---|---|
| clock |
Type: ContinuousClock Description: Generate current time signal |
|
| gain1 |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| cos |
Type: Cos Description: Output the cosine of the input |
|
| sin |
Type: Sin Description: Output the sine of the input |
|
| const |
Type: Constant Description: Generate constant signal of type Real |
|
| gain2 |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| gain3 |
Type: Gain Description: Output the product of a gain value with the input signal |
Used in Examples (1)
|
EducationExamples.MechanicalEngineering.Joystick Model simulating response of three joystick designs to circularly varying test force |