WOLFRAM SYSTEM MODELER
GyroModels a LEGO gyro sensor |
|
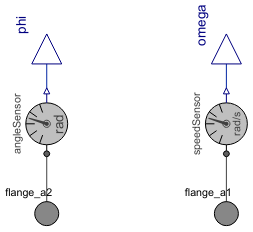
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.MechanicalEngineering.LEGOSegway.Components.Gyro"]
Out[1]:=

Information
This models the gyroscopic sensor of a LEGO Segway.
Parameters (1)
| d_legoBody |
Value: 1e-05 Type: RotationalDampingConstant (N⋅m⋅s/rad) Description: LEGO Body damper constant |
|---|
Connectors (4)
| phi |
Type: RealOutput Description: 'output Real' as connector |
|
|---|---|---|
| omega |
Type: RealOutput Description: 'output Real' as connector |
|
| flange_a1 |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
|
| flange_a2 |
Type: Flange_a Description: One-dimensional rotational flange of a shaft (filled circle icon) |
Components (2)
| speedSensor |
Type: SpeedSensor Description: Ideal sensor to measure the absolute angular velocity of flange |
|
|---|---|---|
| angleSensor |
Type: AngleSensor Description: Ideal sensor to measure the absolute angle of flange |
Used in Components (1)
|
EducationExamples.MechanicalEngineering.LEGOSegway.Components Contains a base model of a LEGO Segway |